U.S. Geological Survey Data Series 577
Side Scan Sonar |
|
Side scan sonar is a type of technology used to interpret seabed features, material, and textures from acoustic backscatter response intensity. In this application the instrument (towfish) is towed by a cable aft of the vessel. Once activated, a fan-shaped acoustic pulse is repeatedly emitted downward to the seafloor, perpendicular to a vessel's navigation track, collecting a series of swaths stitched together to create a sonogram or seafloor image. The towfish can be operated with a range of frequencies; lower frequencies are recorded at a lower resolution but increasing swath range, and higher frequencies record with high resolution at the cost of swath range. High-intensity returns are indications of hard or dense surface material, such as rock or hard-packed sand, whereas low-intensity returns may infer silt or organic material. Intensity images are used in conjunction with physical "grab" samples or cores for the purposed of ground truthing the side scan mosaic.
|
|
Side Scan Sonar Acquisition System Components
|
|
During the 10CCT02 cruise, a Klein 3900 dual-frequency side scan sonar system (fig. 5) was towed off the port quarter of the vessel to collect information about seafloor surface material. SSS was acquired and recorded using SonarPro in an Extended Triton Format (XTF). All horizontal positions were offset relative to a central ship navigation point. Towfish motion is measured by the internal sensors of the instrument. The towfish altitude (height from seafloor) is calculated by the data processing engine, and in this case the altitude varied considerably during the cruise due to the nature of shallow-water surveying operations. Ideally a towfish is flown at a relatively considerable distance from the vessel and the other acoustic instruments to avoid interference. Sources of acoustic interference are vessel vibrations and other instruments such as subbottom profilers and interferometric swath systems that utilize similar frequency ranges. However, in shallow-water surveying the optimal distance is often difficult to achieve due to the negative buoyancy of the towfish and risk of unpredicted isolated shoals.
|
|
The XTF files were converted into CARIS data format structure called Sonar Information Processing System (SIPS) for the purpose of editing and sonar image mosaic creation. The first step in SSS data processing is to correct the altitude, or first return, from the seafloor. This was achieved by a combination of auto-prediction parameters set in Caris SIPS and manual boundary digitization of the water column and seafloor. |
| |||||||
SEA SWATHplus-H 468-kHz Interferometric System CodaOctopus Octopus F190 Precision Attitude and Positioning System OmniSTAR High Performance (HP) correction - 20-cm accuracy
|
Figure 6. Pole-mounted swath transducer lowered into position aboard the R/V Tommy Munro. |
|
| Field Calibration and Acquisition
The swath bathymetry data were collected using SEA SWATHplus-H Interferometric Sonar System (fig. 6) and SEA Swath Processor version 3.6 (fig. 7). Prior to surveying, the system must be calibrated in concert with the CodaOctopus Precision Attitude and Positioning System. This system supplied real-time differential corrections for position using the OmniSTAR reference station network and GNSS constellation, while real-time vessel motion (heave, pitch, and roll) information from the F190 sensor was applied to the acquired swath data. The calibration procedures involved setting the F190 sensor and antennae parameters and offset values into the program, restarting the program with correct values, and proceeding to calibration maneuvers. The vessel needs to execute some type of motion (circles or figure eights) for approximately 30 minutes during the calibration process. The calibration program allows the sensor to orient itself relative to the vessel and obtain a lock on position which will ensure accurate motion and position data in real time during swath acquisition. |
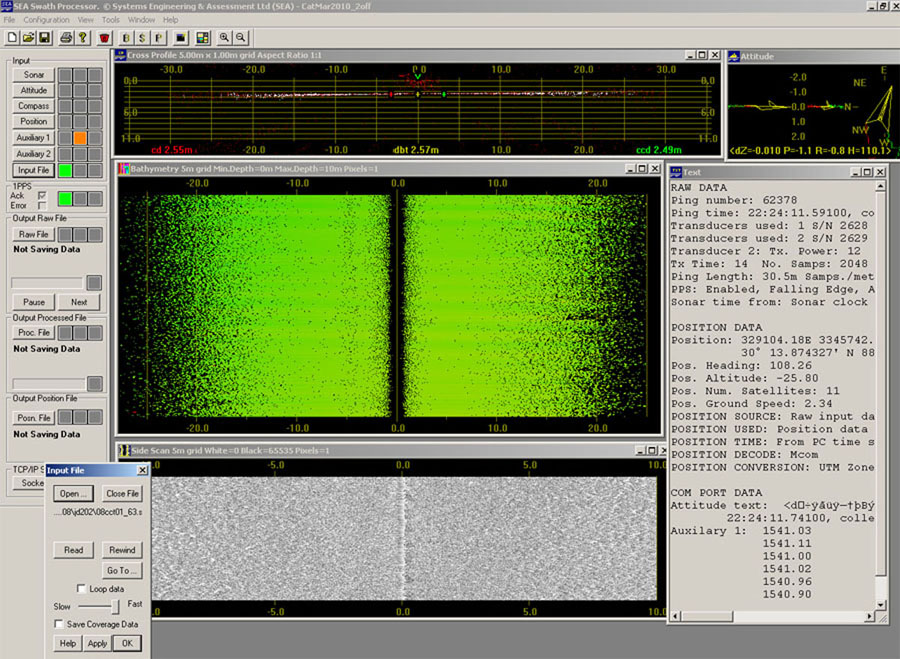
Figure 7. Screenshot of SEA Ltd. SWATHplus Acquisition and Processing Interface. |
Calibration of the SWATHplus sonar head involved entering all setup data parameters into a SEA Swath Processor session file (SXS) and then running a roll calibration test (also known as a patch test) to account for any imperfections in the baseline orientation of the instrument. The roll calibration consisted of seven lines that were 900 m long and spaced 25 m apart to obtain 100 percent overlap coverage. The lines were surveyed over a homogeneous surface in a manner in which the port swath will overlap the port swath and the starboard swath will overlap the starboard swath. These preliminary surveyed lines were then input into SEA’s Grid Processor program version 3.07. The Grid Processor has a roll calibration program that runs a series of calculations on the port to port swaths and the starboard to starboard swaths that produces a roll angle value that is a result of the transducer orientation aboard the respective vessel. Once less than three-thousandths of angle adjustment occurs, final transducer roll angle offset values for the port and starboard, respectively, were added to their default angle (-30 degrees) within the SWATHplus configuration prior to processing bathymetry lines. During acquisition, the differentially corrected positions supplied from OmniSTAR were recorded by the CodaOctopus Octopus F190 and output in the WGS84 datum. Boat position, motion data (roll, pitch, and heave) from the F190, and swath depth measurements were streamed in real time to a dedicated laptop computer. Additionally, a Valeport mini Sound Velocity Sensor (SVS) was attached to the transducer head to supply Speed of Sound (SOS) measurements simultaneously. The SXS used during setup and calibration was updated during the survey to record all streaming data into the SEA Swath Processor raw bathymetry and data coverage formats, respectively (SXR and SXC). During the survey, several complementing SOS casts were measured using a Valeport mini Sound Velocity Profiler (SVP) and input manually into the SXS file. All raw data were backed up digitally onto Blu-ray media and terabyte servers.
Home | Acronyms | Figures | Navigation | Equipment and Processing | Images | Logs |Metadata| Download
|



