Technical
summary of false determination of water depth by the SeaBeam system
Comparison of the present survey depth with depths obtained during cruise RB03-02 along overlapping
portions of the lines, revealed that the new data were on average 100 meters shallower but that the
difference was probably not constant. Despite the presence of SeaBeam engineers on board, it took
2 days to find the source of the problem.
The
new software version (1.2.7) that was installed on the ship in
“Apparent depth mode” (see attachment). This option was put in at the request of a single user more
than 10 years ago (according to Ken Kiesel), but somehow found its way into the software package
that was delivered to the ship. In addition, this option was turned on as a default.
The apparent depth mode option takes the true depth of each beam and calculates the vertical travel
time to the sea surface using the sound velocity profile that is in use at that time of acquisition. It then
multiplies the travel time by a generic constant water speed of 1500 m/s to calculate an “apparent depth”,
which is the depth that would have been measured by a standard depth finder.
The true depth can be back-calculated as follows:
(1) Vertical travel time = (apparent depth-ship’s draft)/1500
(2) True depth = vertical travel time*true sound velocity profile+ ship’s draft
Where the ship’s draft is 5.6 meters.
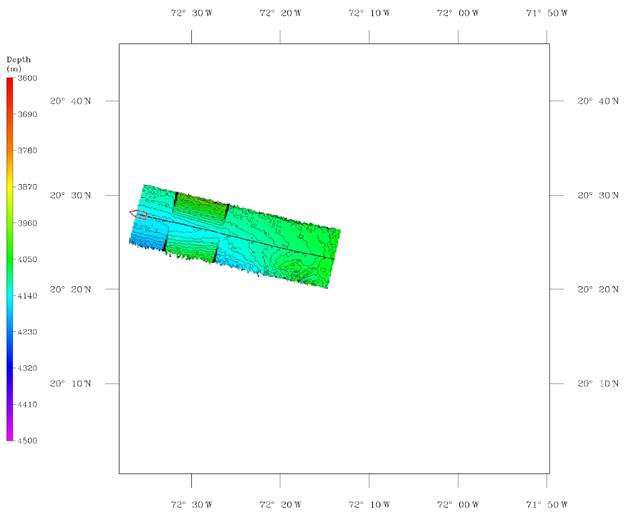
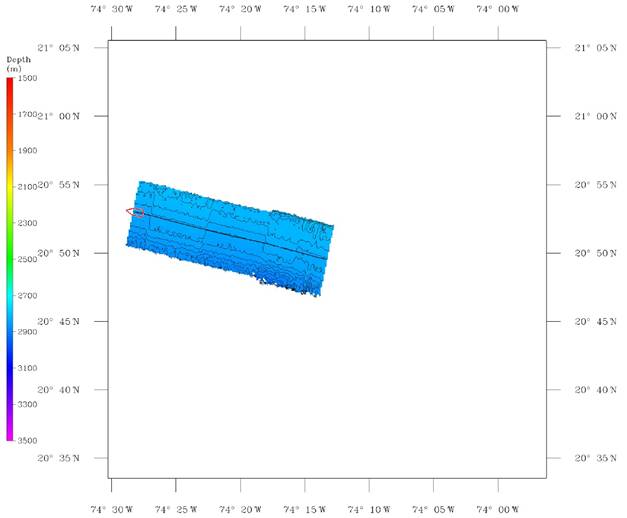
Below
are two screen images of multibeam bathymetry for flat seafloor during the
transit to
Contour interval is 10 meters. Abrupt changes in the contours represents changes from running the
SeaBeam system in true depth mode and apparent depth mode. Sound velocity in the water column
In true depth mode is based on xbt 4.
Trip report submitted by
SeaBeam Instruments engineer aboard the Ron Brown.