U.S. Geological Survey Data Series 577
Differential navigation was acquired using the OmniSTAR Global Positioning System (GPS) and captured using the CodaOctopus Octopus F190 Precision Attitude and Positioning System. Ship navigation was displayed and recorded using hydrographic survey software, HYPACK version 9.0. The swath bathymetry and side scan sonar data were collected simultaneously using SEA Swath Processor version 3.06 and SonarPro version 11.3, respectively. The ship trackline navigation map (fig. 2) covered more than 594 km. This map differs slightly in coverage and length from the processed swath and side scan trackline maps, which produced 591 km and 592 km of tracklines, respectively (fig. 3 and fig. 4). These differences resulted from technical issues such as data loss due to equipment problems, filtering of poor quality data, and inconsistencies in starting and ending respective lines during turns and data partitioning. The navigational trackline maps were created with exported HYPACK positions, while swath and side scan sonar trackline coverages are GeoTIFF files brought into ESRI ArcGIS 10 from CARIS HIPS and SIPS version 7.0.2.
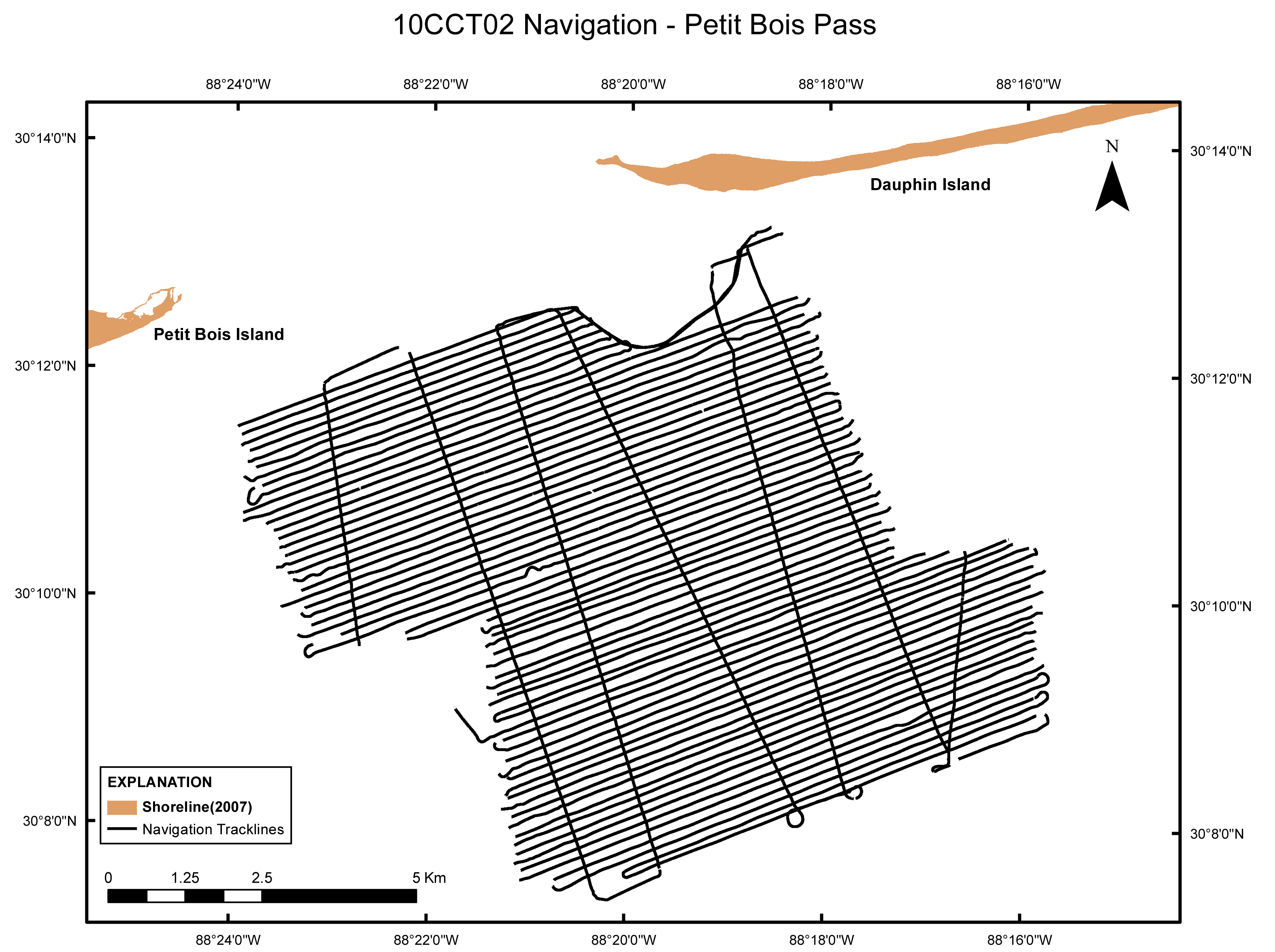
Figure 2. Map showing ship trackline coverage, USGS Cruise 10CCT02. |

Figure 3. Map showing processed swath trackline coverage, USGS Cruise 10CCT02.
|
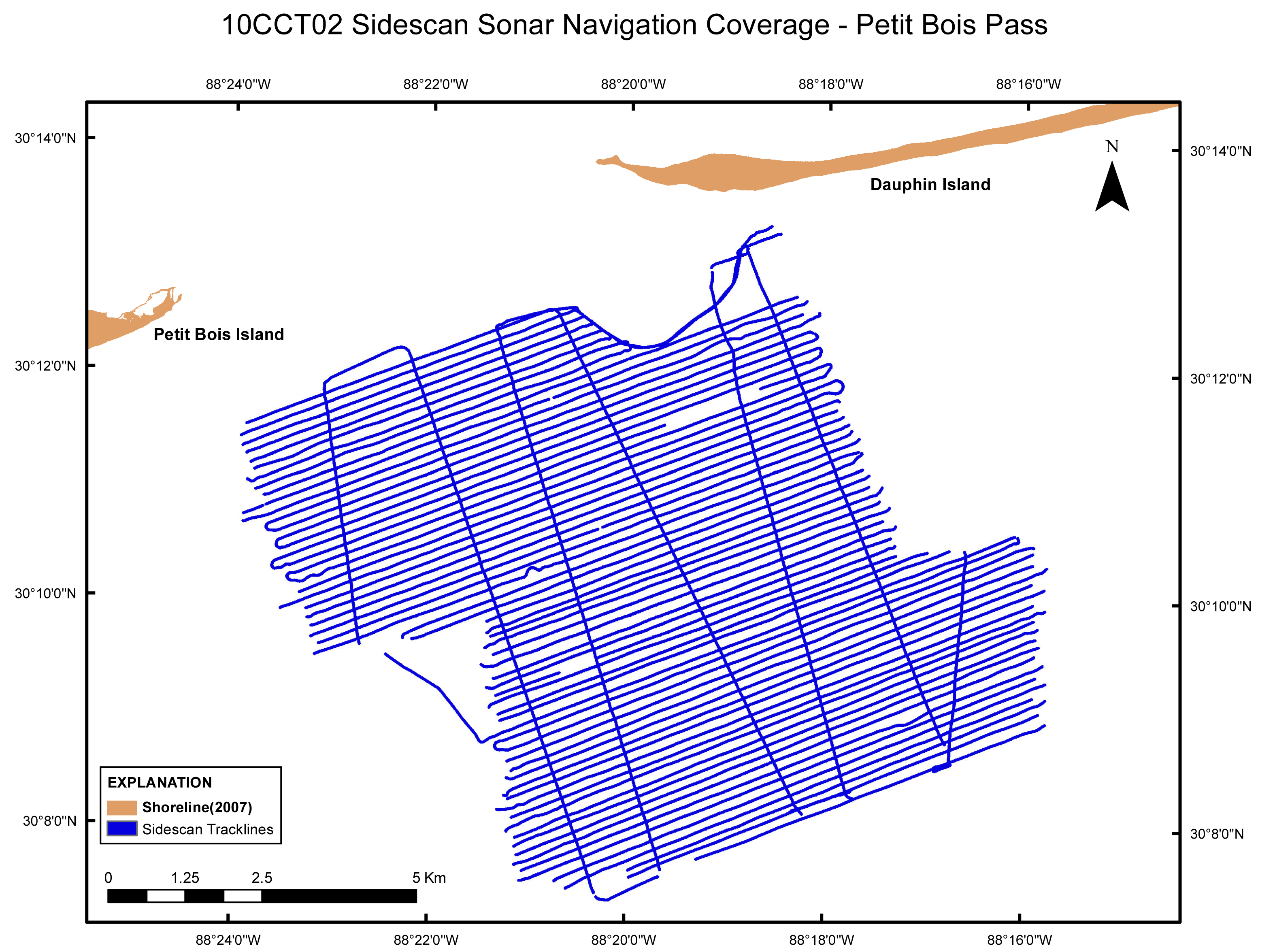
Figure 4. Map showing processed side scan trackline coverage, USGS Cruise 10CCT02. |

![]() U.S. Department of the Interior |
U.S. Geological Survey
U.S. Department of the Interior |
U.S. Geological Survey
URL: https://pubsdata.usgs.gov/pubs/ds/577/html/nav.html
Page Contact Information: William R. Pfeiffer
Page Last Modified: Monday, 28-Nov-2016 16:47:54 EST
