 Abstract Abstract
Topographic survey data of areas on Dauphin Island on the Alabama coast were collected using a truck-mounted mobile terrestrial light detection and ranging system. This system is composed of a high frequency laser scanner in conjunction with an inertial measurement unit and a position and orientation computer to produce highly accurate topographic datasets. A global positioning system base station was set up on a nearby benchmark and logged vertical and horizontal position information during the survey for post-processing. Survey control points were also collected throughout the study area to determine residual errors. Data were collected 5 days after Hurricane Isaac made landfall in early September 2012 to document sediment deposits prior to clean-up efforts. Three data files in ASCII text format with the extension .xyz are included in this report, and each file is named according to both the acquisition date and the relative geographic location on Dauphin Island (for example, 20120903_Central.xyz). Metadata are also included for each of the files in both Extensible Markup Language with the extension .xml and ASCII text formats. These topographic data can be used to analyze the effects of storm surge on barrier island environments and also serve as a baseline dataset for future change detection analyses.
Introduction
A truck-mounted mobile terrestrial light detection and ranging (T-LiDAR) system was used by the U.S. Geological Survey (USGS) to collect topographic survey data of areas on Dauphin Island on the Alabama coast in the aftermath of Hurricane Isaac in early September 2012 (fig. 1). The purpose of the Dauphin Island T-LiDAR survey was to quickly document the sediment deposition resulting from storm surge before clean-up efforts began. Hurricane Issac made landfall on August 28, 2012, on the Louisiana coast as a Category 1 hurricane on the Saffir-Simpson Hurricane Wind Scale (McCallum and others, 2012). USGS personnel deployed a storm tide sensor on the west end of Dauphin Island (USGS SSS-AL-MOB-003WL, fig. 1) as the storm approached, and the sensor recorded a peak water-level elevation of 2.23 meters (m) above the North American Vertical Datum of 1988 (NAVD 88) during the storm. Sand deposits estimated at nearly 1 m in height had accumulated in areas along the west end of the island as a result of the storm.
Tripod-based T-LiDAR technology has proven to be a capable tool for quickly documenting small-scale geomorphic conditions and hazards on the Earth’s surface (Collins and others, 2007; Stock and others, 2011). For this investigation, however, a mobile T-LiDAR system was used because it is particularly suitable for rapid data collection at spatial scales ranging from tens of meters to several kilometers. The mobile T-LiDAR survey covered a 75–100-m-wide swath along Bienville Boulevard and adjacent streets on Dauphin Island. These topographic data can be used to analyze the effects of storm surge on barrier island environments and also serve as a baseline dataset for future change detection analyses. Specific details of the mobile T-LiDAR methods and data format are included in this report.
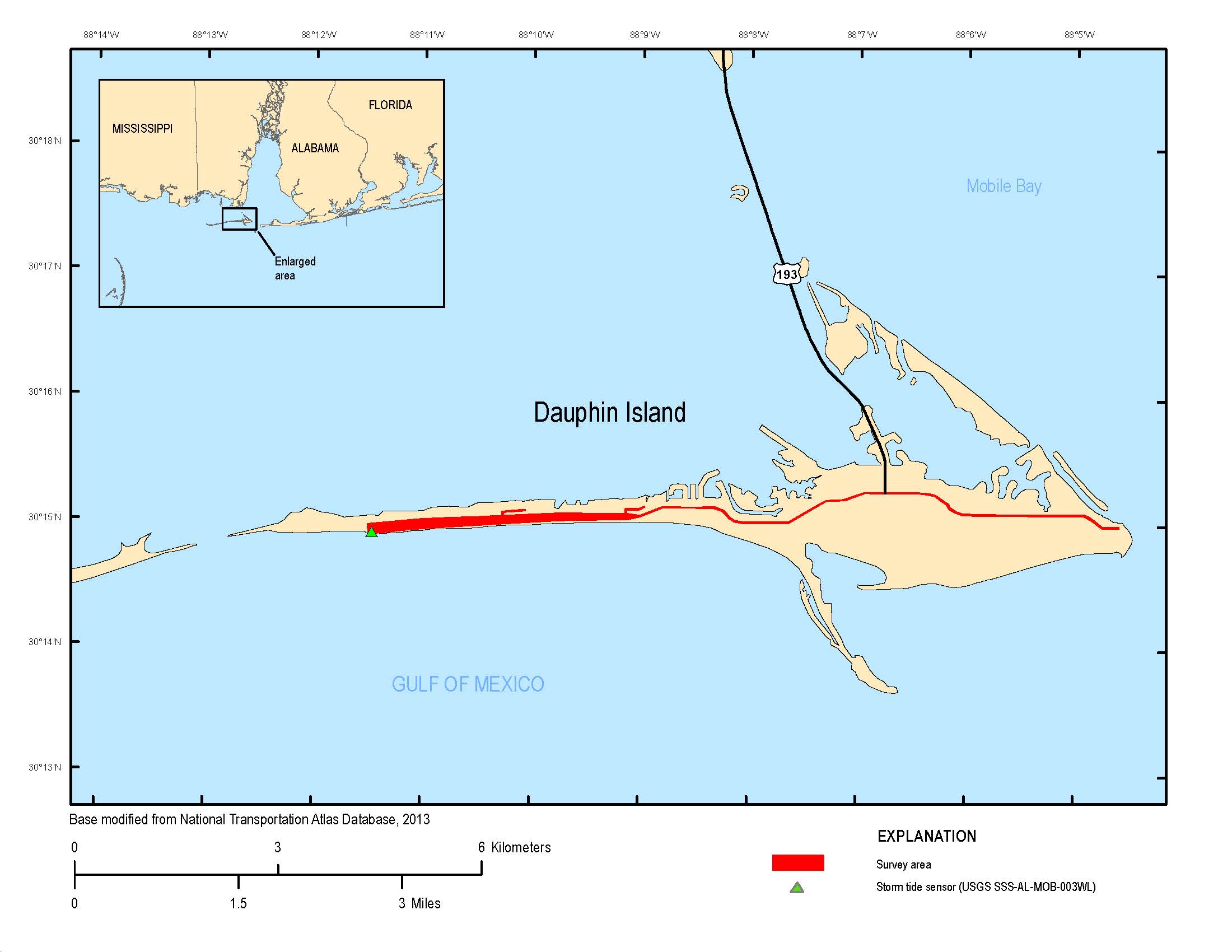
Figure 1. Location of the mobile T-LiDAR survey on Dauphin Island, Alabama.
Data Collection and Processing Methods
T-LiDAR technology uses laser pulses that are sent from the instrument and reflected off objects within its field of view. The instrument calculates the distance of each returned laser pulse on the basis of the velocity of the pulse, while also logging the vertical and horizontal angle of each pulse (Kimbrow and Lee, 2013). Topographic survey data were collected in September 2012 using a mobile T-LiDAR system which includes an Optech ILRIS HD-ER-MC instrument (Optech, 2013) in conjunction with an Applanix position and orientation system (POSMV) (Applanix, 2013). The Optech HD-ER-MC has a laser repetition rate of 10 kilohertz and a laser wavelength of 1,535 nanometers, which falls within the near-infrared portion of the electromagnetic spectrum. The POSMV is composed of two global positioning system (GPS) receivers, an inertial measurement unit (IMU), and a position and orientation computer. The mobile T-LiDAR system requires a rigorous calibration procedure before accurate datasets can be generated. All instrumentation must first be surveyed, and their relative positions (lever arms) must be resolved with respect to the origin point of the IMU. Next, a boresight procedure is performed in order to determine the angular differences (that is, roll, pitch, and heading) between the IMU and the T-LiDAR instrument. This process involves surveying at least three targets with traditional methods, and then scanning those targets with the mobile T-LiDAR system from a static position. Optech MatchView software is then used to derive the angular differences, and a boresight calibration file is output. The boresight calibration file typically requires additional iterative adjustments to produce the most accurate results.
For this survey the T-LiDAR instrument was mounted on top of a truck, and faced toward the passenger side for scanning the road shoulder and adjacent dunes. The scanner was then moved to a facing-back position to effectively scan the road surface. Typical driving speed was less than 10 kilometers (km) per hour. The POSMV system collected attitude and trajectory information during the survey, and these data were later post-processed using Applanix POSPac MMS software with GPS data from a base station that was set up on a nearby benchmark. The POSPac MMS software uses differential correction algorithms to compute a smoothed best estimate of trajectory (SBET) file. The SBET file is then applied to the raw T-LiDAR data along with the boresight parameter file using Optech Parser software to produce a geo-referenced point-cloud dataset. Thirty-eight additional topographic data points were collected for survey control using a real-time kinematic global positioning system (RTK-GPS) unit. The RTK-GPS survey campaign followed the quality standards of a USGS Level IV survey (Rydlund and Densmore, 2012). These control points (cross sections of road, points along curbs, and fire hydrants) were evenly distributed throughout the survey site and were also visible within the point-cloud dataset. The RTK-GPS control points were compared to data points within the T-LiDAR point-cloud, and the residual error was computed. The horizontal and vertical error for this survey was +/–0.05 m and +/–0.10 m, respectively. Typical point spacing of these data are less than 1 m; however, the T-LiDAR instrument collects data from a horizontal perspective, so point spacing may be more or less due to data shadows in areas out of the instrument’s line of sight.
Electronic Data Format
This report provides topographic data in ASCII text format with the extension .xyz. The horizontal XY coordinates have been positioned in the North American Datum of 1983, Universal Transverse Mercator, Zone 16 North coordinate system. The vertical Z values are referenced to the NAVD 88 vertical reference system using geoid model GEOID09 (National Geodetic Survey, 2013). Intensity values are also included in the data file for each point. Intensity values represent the amount of near-infrared reflectance received by the T-LiDAR instrument and range from 0 to 255. Three data files are included in this report, and each is named according to both the acquisition date and the relative geographic location on Dauphin Island (for example, 20120903_Central.xyz). Metadata are also included for each of the files in ASCII text and .xml format.
References Cited
Applanix, 2013, Applanix marine products—POSMV, accessed October 2013 at http://www.applanix.com/products/marine/pos-mv.html.
Collins, B.D., Kayen, Robert, Reiss, Thomas, and Sitar, Nicholas, 2007, Terrestrial LIDAR investigation of the December 2003 and January 2007 activations of the Northridge Bluff Landslide, Daly City, California: U.S. Geological Survey Open-File Report 2007–1079, 32 p., accessed May 7, 2014, at https://pubs.usgs.gov/of/2007/1079/.
Kimbrow, D.R., and Lee, K.G., 2013, Erosion monitoring along the Coosa River below Logan Martin Dam near Vincent, Alabama, using terrestrial light detection and ranging (T-LiDAR) technology: U.S. Geological Survey Scientific Investigations Report 2013–5128, 7 p., accessed May 7, 2014, at https://pubs.usgs.gov/sir/2013/5128/.
McCallum, B.E., McGee, B.D., Kimbrow, D.R., Runner, M.S., Painter, J.A., Frantz, E.R., and Gotvald, A.J., 2012, Monitoring storm tide and flooding from Hurricane Isaac along the Gulf Coast of the United States, August 2012: U.S. Geological Survey Open-File Report 2012–1263, 24 p., accessed May 7, 2014, at https://pubs.usgs.gov/of/2012/1263/.
National Geodetic Survey, 2013, NGS Geodetic Tool Kit—GEOID09, accessed September 2013 at http://www.ngs.noaa.gov/TOOLS/index.shtml.
Optech, 2013, Optech ILRIS-3d Intelligent Laser Ranging and Imaging System, accessed October 2013 at http://www.optech.ca/i3dprodline-ilris3d.htm.
Research and Innovative Technology Administration Bureau of Transportation Statistics, 2013, National Transportation Atlas Database, U.S. State Boundaries, accessed January 2013 at http://www.rita.dot.gov/bts/sites/rita.dot.gov.bts/files/publications/national_transportation_atlas_database/2013/polygon.html.
Rydlund, P.H., Jr., and Densmore, B.K., 2012, Methods of practice and guidelines for using survey-grade global navigation satellite systems (GNSS) to establish vertical datum in the United States Geological Survey: U.S. Geological Survey Techniques and Methods, book 11, chap. D1, 102 p. with appendixes.
Stock, G.M., Bawden, G., Green, J., Hanson, E., Downing, G., Collins, B., Bond, S., and Leslar, M., 2011, High resolution three-dimensional imaging and analysis of rock falls in Yosemite Valley, California: Geosphere, v. 7, no. 2, p. 573–581.
|

