U.S. Geological Survey
Data Series 320
Sea-Floor Mapping and Benthic Habitat GIS for the Elwha River Delta Nearshore, Washington |
||||||||
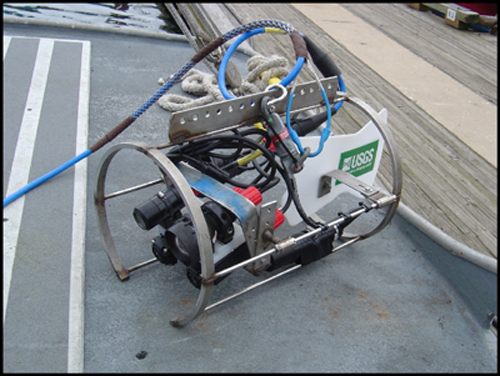
METHODSBenthic substrate and habitat mapping were conducted with combined interferometric sonar and underwater video-camera system operated from the research vessel R/V Karluk from March 1531, 2005. The cruise reports can be viewed online at http://walrus.wr.usgs.gov/infobank/k/k105ps/html/k-1-05-ps.meta.html and http://walrus.wr.usgs.gov/infobank/k/k204ps/html/k-2-04-ps.meta.html. Sonar data were collected using a 234 kHz SEA Swathplus interferometric sonar. Interferometric sonar imaging provides high-resolution images of the sea floor by recording the intensity of sound reflected off the sea floor (acoustic amplitude). In addition, sea-floor depth data are estimated from the phase difference between seafloor reflections received by spaced receivers. The sonar was mounted on a pole manufactured expressly for use on the R/V Karluk (fig. 2), while the Karluk was navigated on alongshore transects at approximately 4 knots. 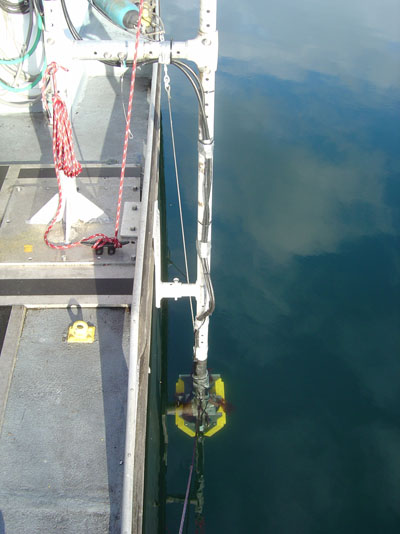
Figure 2. Custom mount for the interferometric sonar on the starboard aft deck of the R/V Karluk. Video imagery of the seafloor was obtained on the final 3 days (March 16-18, 2004) of the USGS research cruise aboard the R/V Karluk. The techniques used to characterize the video observations real-time on the boat were consistent with methods described by Anderson et. al. (in press). The objectives of sea-floor video characterization were to: (1) record geologic and biologic characteristics of the sea floor in real-time, (2) ground-truth geophysical data (bathymetry and amplitude) by resolving both common and unique features of the sea floor, and (3) examine regions of transition between different substrate types as suggested in acoustic amplitude data. Video observations were subsequently used to construct maps of substrate type and habitat distribution and to provide a measure of uncertainty in the final products. Thus, video transect locations were selected on the basis of the existence, quality, and complexity of sonar data and on regions of geologic transition and/or biologic significance.
Figure 3. Underwater video sled used to characterize sea-floor features. An underwater video sled (fig. 3) was towed behind the vessel, at an altitude of 1-3 m above the seafloor. The R/V Karluk was generally drifting during video transects, because the coastal currents were adequate to transport the boat at speeds over 1 knot. Video footage was recorded to digital mini-DV tape and then copied to DVD. Ship position was determined by a CSI Wireless differential geographic positioning system (dGPS). All instrument data were multiplexed through a sub-sea housing and transmitted by the 12-conductor cable to a topside console. Latitude, longitude, height above the seafloor, pitch, roll, water depth, ship speed, ship heading, and Coordinate Universal Time (UTC) were continuously imprinted on the digital video tape while recording. These data were also automatically recorded once per second in a navigational text file. Positional accuracy of the sled relative to the ship's dGPS position varied with water depth, current speed and direction, and conditions. Cable layback was not measured directly but was estimated to be less than or equal to the water depth during the deployments. Sea-floor characteristics were observed and recorded digitally in real-time at 30 second intervals by a geologist and a biologist watching the towed video. Observations included geomorphology, sediment texture, and biota, and observation codes were entered as "events" in G-Nav navigation software (see acknowledgments) using an "X-Keys" programmable keypad and a Dell Inspiron 8100 laptop computer. Time (UTC), dGPS position, and other ship data for were automatically recorded in the text file each time an observation event was entered. Observations at each event included:
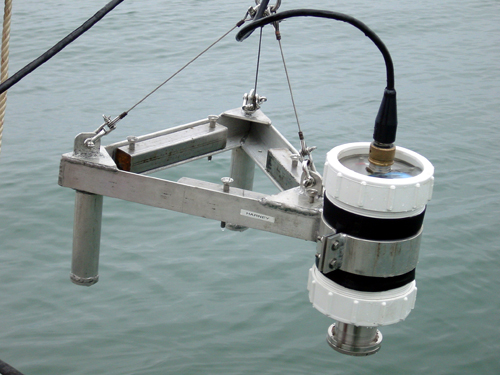
Nearly 9 hours of underwater video were collected and logged real-time in this manner on 18 transects. Samples of seafloor grain-size were obtained with an underwater microscope camera (fig. 4) described by Rubin and others (2006) and analyzed by techniques described in Rubin (2004). The camera technique allows for rapid collection of numerous surficial sediment samples and grain-size analysis by autocorrelation spatial statistics on the digital photographs. The camera sampling occurred during the 2004 cruise (K-1-04-PS) during March 21-22, 2004. Eight surficial sediment grab samples were also obtained on these dates for calibration of the images.
Figure 4. Grain-size camera mount used for seafloor sediment sampling. For each photograph autocorrelation analyses were conducted to measure the average grain size and the distribution of the grain-sizes. The autocorrelation technique was also used to generate a cumulative distribution function of the grain sizes using the Folk and Ward (1957) technique, which was in turn used to compute a number of distribution results, including median, standard deviation, distribution percentiles, sorting, and kurtosis. The sonar data set covers 19.6 km2 and consists of 90 line-files. Sonar bathymetry and amplitude data were processed separately. The bathymetric data were processed using SEA SwathProcessor v2.01. Both the bathymetry and amplitude data output from these software packages were mosaiced into continuous images of the study area using ESRI's ArcGIS v9.1. A horizontal resolution of 1 m was chosen for the bathymetry, and 0.25 m for the amplitude with 8 bit grayscale values proportional to the acoustic amplitude of the sea floor. Processing steps performed on each of these 90 lines were: Processing backscatter-intensity data
Processing bathymetry data
Analytical Methods for Sea-Floor Classification Using the combined video and sonar data, we identified four main sea-floor classes in the study area: hard-rugose (boulder and bedrock reefs), hard-flat (mixed sand to cobble sediment), soft (broad areas of medium sand), and sand waves (patches of coarse sand and shell hash with approximately 1-m wavelength ripples). The area mapped by sonar was classified into seafloor classes using the Supervised Maximum Likelihood Classification tool of the Spatial Analyst extension in ESRI ArcGIS 9.1:
1. Euclidean distance from track line grid 2. Rugosity (derived from mosaiced bathy using the Benthic Terrain Modeling Tool Rugosity Builder (http://www.csc.noaa.gov/products/btm/) 3. Entropy from amplitude at 1-m resolution 4. Homogeneity from amplitude at 1-m resolution 5. Entropy from amplitude at 0.25-m resolution 6. Homogeneity from amplitude at 0.25-m resolution 7. Amplitude at 0.25-m resolution Interpretation of the processed sonar data and video observations resulted in predictions of benthic habitat distribution in the region. These predictions are distinguished as habitat classification codes that follow the “Deep-Water Marine Benthic Habitat Classification Scheme; Key to Habitat Classification Code for Mapping and use with GIS programs.” (modified after Greene and others, 1999). The Deep-Water Marine Benthic Habitat Classification Scheme is outlined below.
|
Project Description
|
|||||||
|
||||||||
Accessibility
|
FOIA
| Privacy
|
Policies and Notices
U.S. Department of the Interior
U.S. Geological Survey
URL: https://pubs.usgs.gov/ds/320/methods.html
maintained by Michael Diggles
last modified June 17, 2009 (mfd)