Data Series 914
|
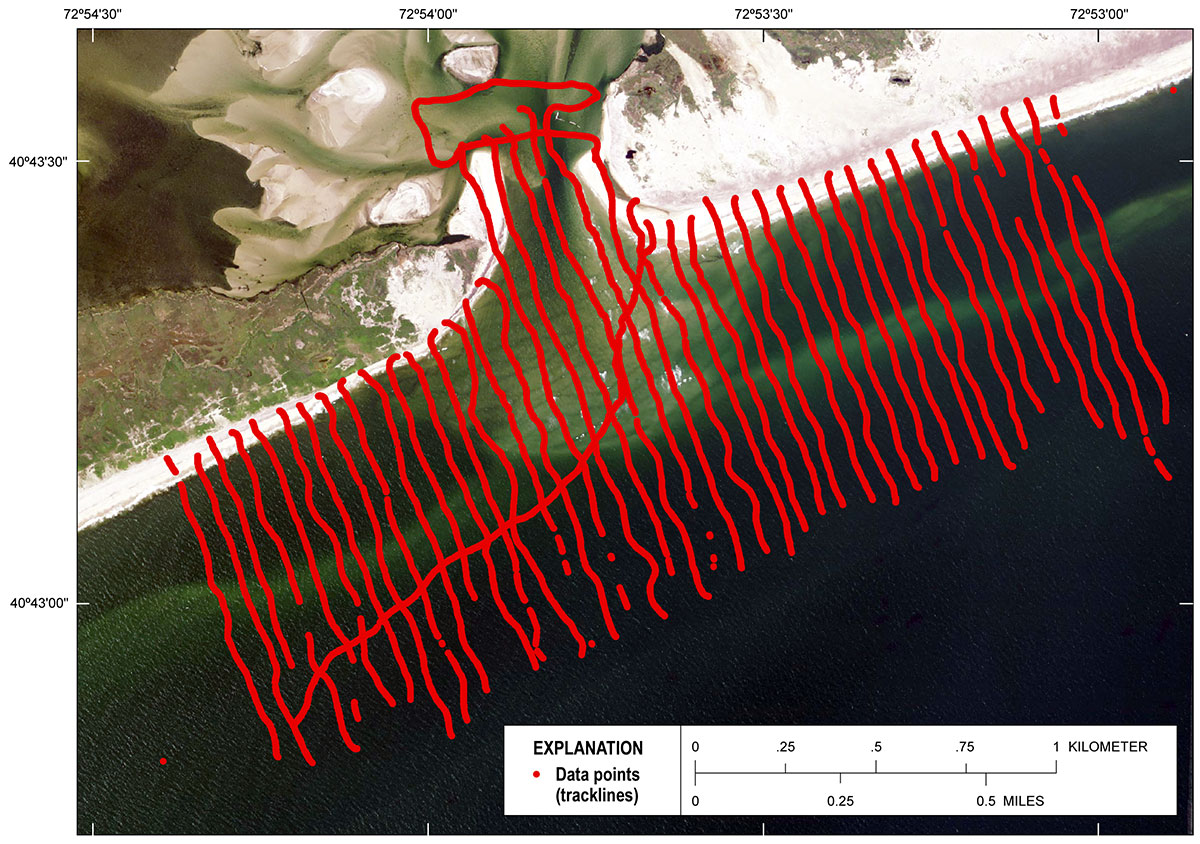
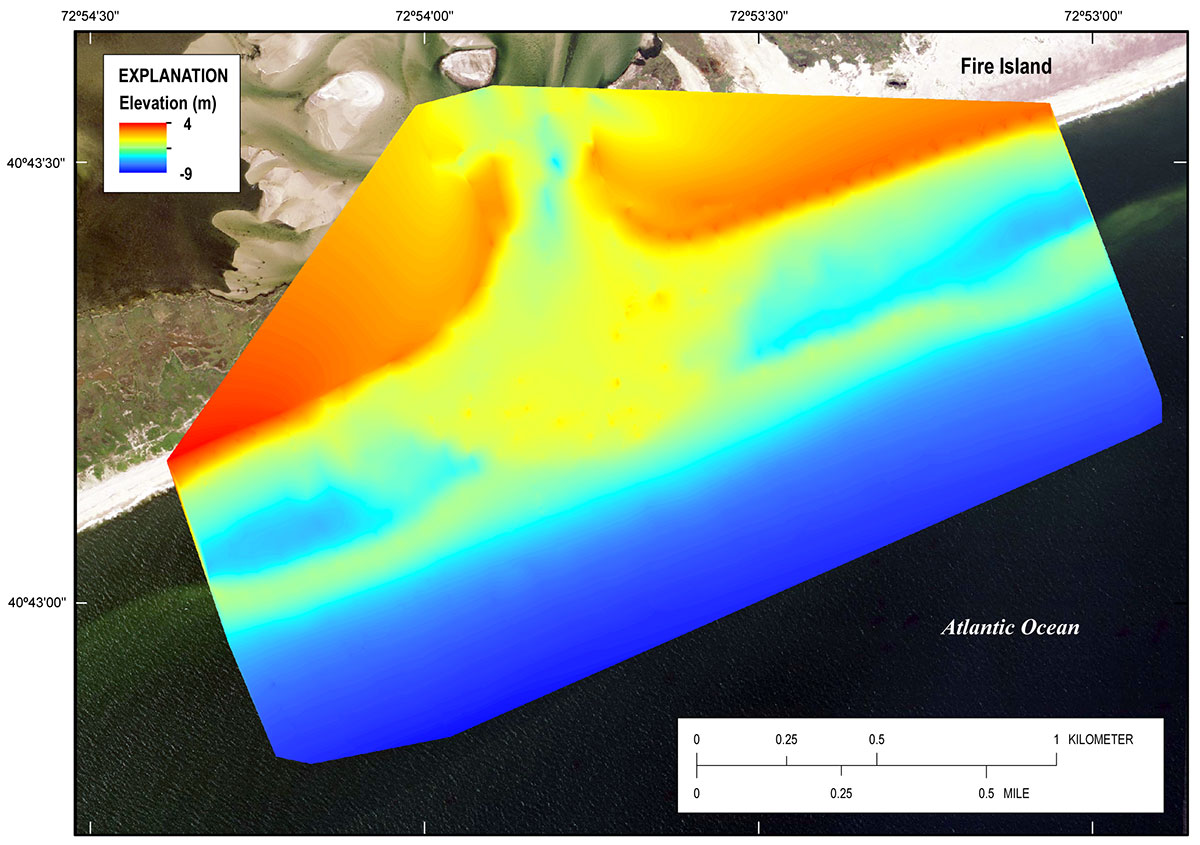
DataUSACE Data ProcessingThe data were processed by staff at the USACE FRF. The following processing steps are informational and are summarized from the USACE FRF Web site (http://www.frf.usace.army.mil/larc/larcsystem.stm). The HYPACK software merged the GPS and echosounder data to create text files, in .RAW format, which were later analyzed by the custom-built FRF FORTRAN software. The time stamp on the echosounder was corrected for “drift” using the GPS time clock. The custom FRF software was used to remove the motion of the LARC caused by waves and changing tide level. The software also adjusted the measurements to changes in the speed of sound over the survey area and correctly aligned the time of the echosounder and the GPS data. This was done by dynamically adjusting the time or latency of the GPS data relative to the echosounder data until a best fit was achieved. The standard estimate of uncertainty for data collection using the LARC single-beam system is +/– 2.0 to 4.0 cm, providing that certain criteria are met such as the base station is located within 5 km of the survey area, the base station is broadcasting RTK corrections, and the sound velocity of the water column is measured at the time of the survey. For this survey all the criteria were met, including the base station which was within approximately 2.7 km of the survey (fig. 6), RTK that was broadcasting from the base, and CTD measurements that were taken a minimum of twice per survey day. USGS Data ProcessingThe post-processed topographic-bathymetric data from USACE were imported into ArcGIS 10.2.1 and used to create a point shapefile of the x,y,z data (fig. 7). The data were converted from New York Long Island State Plane coordinates, meters (3104) projection, to North American Datum of 1983 (NAD 83), Universal Transverse Mercator (UTM) Zone 18 North (18N), meters projection. The elevations are in orthometric heights referenced to the North American Vertical Datum of 1988 (NAVD 88), derived from GEOID09 geoid model. The single-beam elevations were examined for vertical agreement using ArcGIS 10.2.1. A digital elevation model (DEM) with a 1 m cell resolution was generated from the x,y,z points using a standard ArcGIS natural neighbors gridding algorithm. The DEM was used to visually identify errant elevations that resulted from GPS dropouts during the survey. The point shapefile was then edited to remove the errant data, and a new DEM was created using natural neighbors algorithm and 1 m cell size (fig. 8). The uncertainty for the interpolated DEM was determined using a methodology established by Lentz and Hapke (2011) and Lentz and others (2013), and by withholding a random distribution of 10 percent of the point data from the gridding process, comparing the elevations of the withheld points to the gridded surface, and calculating a root mean square error (RMSE) that was based on the elevation differences. The resulting RMSE uncertainty of the interpolated surface was determined to be ±0.05 m. The edited x,y,z points were exported from ArcGIS into an ASCII text file. In order to estimate an uncertainty on the point data, an RMSE of 0.1 m was calculated using elevations from coincident locations (within 1 m) that were surveyed on the shore-perpendicular transects and the diagonal transit line (fig. 7).
Data Downloads
|

![]() U.S. Department of the Interior |
U.S. Geological Survey
U.S. Department of the Interior |
U.S. Geological Survey
URL: http://pubsdata.usgs.gov/pubs/ds/0914/ds914_data.html
Page Contact Information: GS Pubs Web Contact
Page Last Modified: Monday, 28-Nov-2016 20:31:26 EST