







Data Acquisition
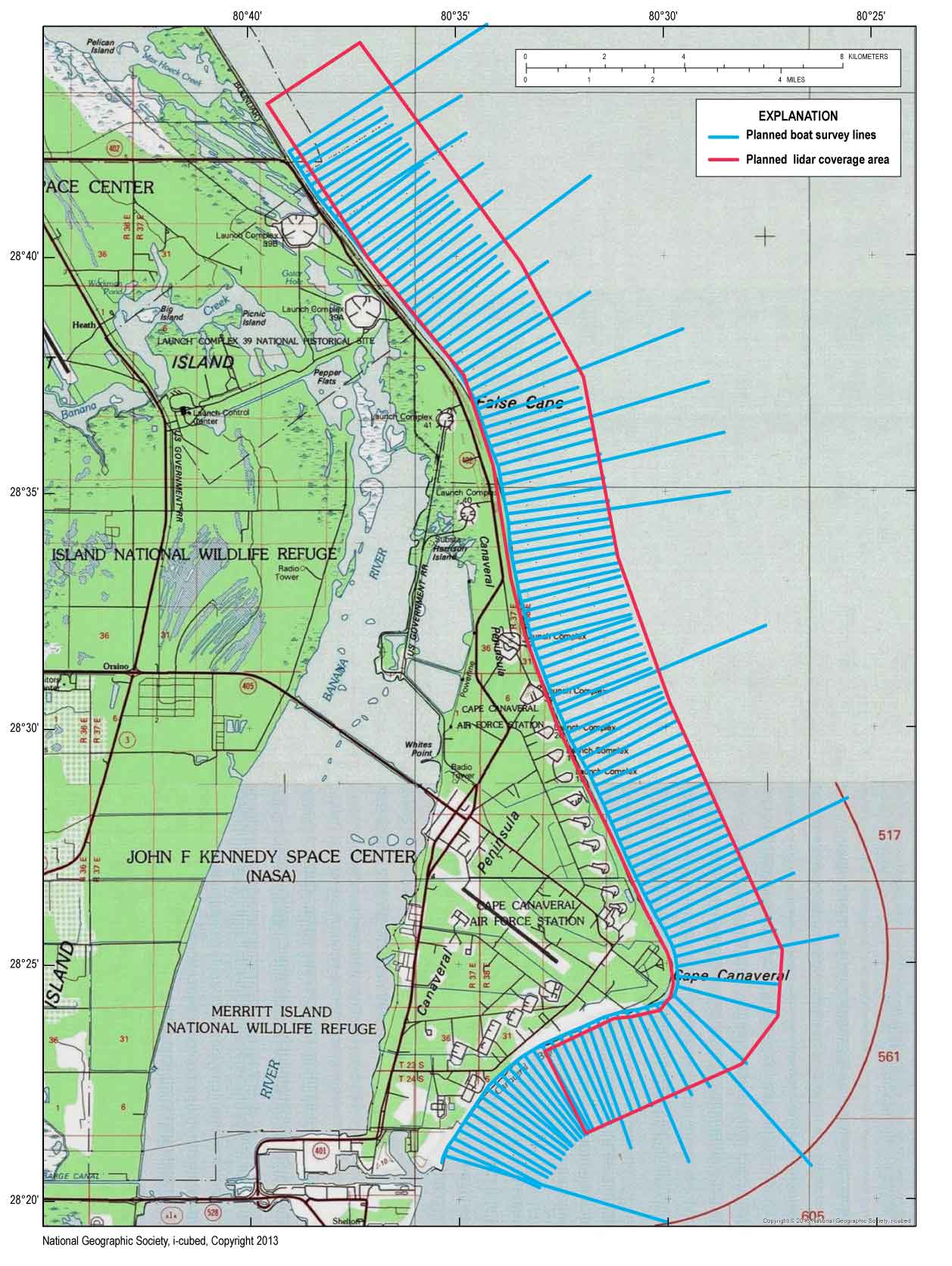 Figure 3. Planned boat survey lines and lidar coverage area. Boat-cyan, lidar-magenta. [Click to enlarge] Bathymetric data were acquired using boat- and aircraft-based technology. The boat method used a sonar-based system named SANDS (Hansen, 2008) developed by the USGS in 1992, one of the first operational hydrographic systems to incorporate GPS for vertical positioning. The airborne method is a lidar system named EAARL-B (C.W. Wright, U.S. Geological Survey, oral commun., 2015) developed by the USGS, a second generation green light lidar system based on NASA's EAARL system. Both hydrographic survey systems have been specifically designed to accurately map in very shallow water with minimum depths of approximately 25 cm. Figure 3 shows boat tracklines (shore normal lines) and survey coverage box for the lidar acquisition. Boat AcquisitionThe SANDS system uses L1/L2 full carrier phase GPS receivers, a motion compensator (heave, pitch, and roll), and a survey grade echo sounder. Variable water densities through the water column affect the travel speed of sound, thus influencing the water depth measurements. To correct for varying water densities, speed of sound measurements through the water column were collected using a sound velocity profiler at three stations during data collection. Two types of boat based survey platforms were used for the survey; a 17-ft outboard motor boat and two jet skis (fig. 4). The boat also acted as a support vessel for the jet skis in the event of any electrical or mechanical failures. All three platforms were simultaneously operated for the survey. GPS non-corrected or pseudo-position data are recorded in a data file on the boat's PC using HYPACK© software by HYPACK, Inc. Each GPS pseudo-position measurement recorded by HYPACK© software is time stamped with the UTC time and the PC's internal time. Data strings from the motion sensor and the fathometer are recorded with the associated PC time stamp. Aircraft AcquisitionThe EAARL-B is an airborne lidar system that includes a raster-scanning, water penetrating, full-waveform, adaptive lidar and an array of precision kinematic differential GPS receivers, which provide for sub-meter geo-referencing of each laser and hyper-spectral sample. EAARL-B detects, captures, and automatically adapts to each laser return backscatter over a large signal dynamic range. GPS non-corrected or pseudo-position data are recorded in a data file aboard the aircraft using USGS developed software. Data strings from the laser, Inertial Measurement Unit (IMU), and heading compass are recorded with the associated GPS time stamp. EAARL-B is unique in that the full laser return waveform is digitized and recorded (fig. 5).
Any use of trade, firm, or product names is for descriptive purposes only and does not imply endorsement by the U.S. Government. |
||


