









Data Processing
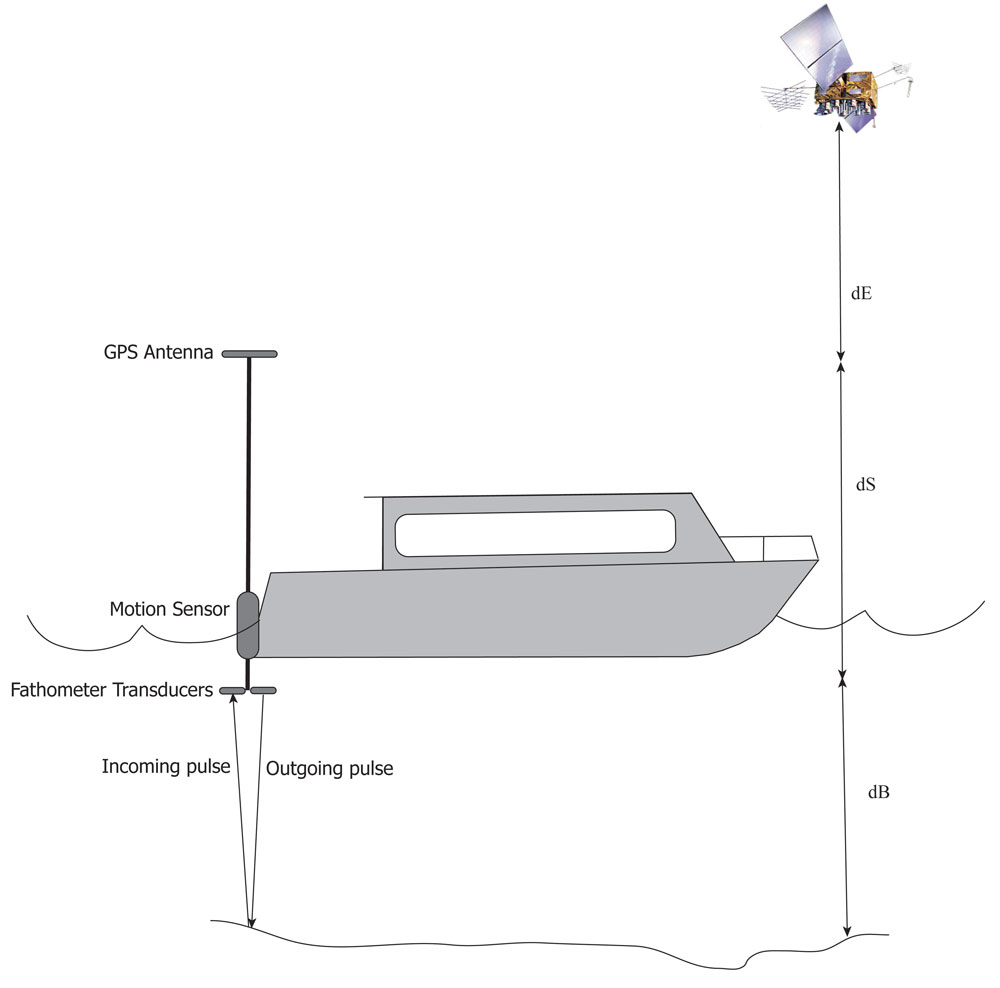 Figure 6. Vertical reference components (dE=ellipsoid to GPS antenna; dS=antenna offset height; dB=depth to sea bed). [Click to enlarge] Horizontal and vertical data acquired by the sonar- and lidar-bathymetric systems are referenced to the earth-centered coordinate system World Geodetic System 1984 (WGS84). Earth-centered systems reference all points on the earth's surface relative to a theoretical centroid of the earth. Vertical positions referenced to earth-centered systems are referred to as ellipsoid heights. Using earth-centered reference systems for the vertical component of the data eliminates the need to reference bathymetric data to water level, measured by tide gages. Earth centered reference ellipsoid height is more accurate than a water-level datum and is globally applicable. Converting to a water-level-based datum such as Mean Low Water (MLW) or Mean Lower Low Water (MLLW) can be accomplished by using tools such as National Geodetic Survey (NGS) Vertical Datum Transformation (VDATUM). Figure 6 illustrates the relation of the ellipsoid to boat depth soundings, figure 6 is similar for lidar laser shots. Trajectory ProcessingPrecise boat and aircraft trajectories were determined using GPS data processed with Ashtech Precise Navigation (PNAV) and later Novatel/Waypoint GrafNav software. PNAV/GrafNav calculates the relative position of the survey platform receiver (rover) to the base receiver. Thus, all trajectories are relative to the reference station position. A single output file of precise boat trajectory and quality control information was produced for each survey day and for each survey platform. The output provides precise position measurements that are time stamped with GPS time, thus allowing the data to be merged with the boat and lidar sensor data. Sonar ProcessingPost-processing of single beam sonar data was accomplished using custom-built U.S. Geological Survey (USGS) System for Accurate Nearshore Depth Surveying (SANDS) software. SANDS was used to edit erroneous sounding data, synchronize the precise boat GPS trajectory with sonar data, and apply geometric corrections using the recorded pitch and roll measurements. The final processing step creates sea floor elevations by merging the measured distance from the ellipsoid to the GPS antenna phase center "dE," corrected GPS/transducer staff height "dS," and corrected distance from the transducer to the sea floor "dB" (fig. 6). Thus, final elevations are relative to the ellipsoid (WGS84) and can then be converted to orthometric height or North American Vertical Datum of 1988 (NAVD88) using NGS GEOIDyy (where yy is the date) geoid separation model software. The specific GEOID model utilized varied depending on the date of the survey. Post-processing of interferometric beam sonar data was accomplished using System Engineering and Assessment Limited’s (Sea) SeaSwath processing software. SeaSwath was used to filter erroneous sounding data, synchronize the precise boat GPS trajectory with swath data, and apply geometric corrections using the recorded pitch and roll measurements. The final processing step creates sea floor elevations by merging the measured boat GPS trajectory data with the corrected swath sonar data. Lidar Processing Post-processing of lidar data was accomplished using custom-built National Aeronautics and Space Administration (NASA) Airborne Lidar Processing System (ALPS) software (Wright and others, 2014) that combines laser return backscatter with aircraft positioning data derived from the Inertial Motion Unit (IMU) and GPS receivers. ALPS was used to detect the first return from the water (or land) surface as well as to find a last return corresponding to the sea floor. In submerged environments, effects of light refraction and change in speed of light in the water column were accounted for in the “submerged topography” algorithm. The lidar data were reviewed manually, and data that did not penetrate to the sea floor were removed. Similar to the boat data, final elevations of the submerged topography are relative to the ellipsoid (WGS84) and can then be converted to orthometric height or NAVD88 using NGS GEOIDyy geoid separation model software (Nayegandhi and others, 2004). The specific GEOID model varied depending on date of the survey. Disclaimer: This report was prepared by an agency of the United States Government. Although these data have been processed successfully on a computer system at the U.S. Geological Survey (USGS), no warranty expressed or implied is made regarding the display or utility of the data on any other system, nor shall the act of distribution imply any such warranty. The USGS shall not be held liable for improper or incorrect use of the data described and (or) contained herein. Reference herein to any specific commercial product, process, or service by trade name, trademark, manufacturer, or otherwise does not constitute or imply its endorsement, recommendation, or favoring by the United States Government or any agency thereof. |
