Data Series 1081
| Data ProcessingSingle-Beam BathymetryNavigationThe coordinate values for the GPS base stations at bench marks 20-2Q 98 and WHRN 2008 are the time-weighted average of values obtained from the National Geodetic Survey’s (NGS) Online Positioning User Service (OPUS). Only one GPS occupation was collected on bench mark 4756 F 2011; therefore, the published coordinates from PID BBCL83 were used in post processing. The base station coordinates were imported into GrafNav version 8.6 (Waypoint Products Group) and the kinematic GPS data from the survey vessels were post-processed to the concurrent GPS data from the base stations. In all cases, the closest base station to the roving vessel was used to keep vertical error to a minimum. The final, differentially corrected, precise DGPS positions were computed at intervals of 5 Hz (or every 0.2 s) exported in American Standard Code for Information Interchange (ASCII) text format. The GPS data were processed and exported in the WGS84 (G1150) geodetic datum, which is equivalent to the International Terrestrial Reference Frame of 2000 (ITRF00) (Merrigan and others, 2002; Soler and Snay, 2004). Soundings and MotionThe raw HYPACK data files were imported into CARIS Hydrographic Information Processing System and Sonar Information Processing System (HIPS and SIPS) version 10.2. The post-processed DGPS positions exported from GrafNav were also imported into CARIS using the generic data-parser tool. After parsing, the navigation data were scanned using the Navigation Editor to verify that the parsed data correctly corresponded to the processed DGPS trajectories, and the SVP profile casts were imported using the SVP Editor. The bathymetric data components (position, motion, depth, and SOS) were then merged and geometrically corrected in CARIS to produce processed x,y,z point data. The data were then edited for outliers and reviewed using the Subset Editor utility to identify crossing line offsets or other problem areas and to remove any erroneous data points. Erroneous soundings are usually visually obvious and are often related to cavitation in the water column obscuring the fathometer signal, tight turns that can affect the tracking of incoming GPS signals, or general equipment issues. Soundings in areas of extremely shallow water (0.30–0.50 m) over sandbars or seagrass beds were reviewed against the surrounding data for coherency. The processed point data were then exported as an x,y,z ASCII text file referenced to WGS84 (G1150), which is equivalent to ITRF00, and ellipsoid height in meters. Vertical TransformationUsing the National Oceanic and Atmospheric Administration (NOAA) transformation software, VDatum version 3.6, the data were transformed horizontally and vertically from ITRF00 into North American Datum of 1983 (NAD83 [CORS96]) and North American Vertical Datum of 1988 (NAVD88 [orthometric height]) using the NGS geoid model of 2012B (GEOID12B). The data were subsequently transformed from NAD83 (CORS96) and NAVD88 GEOID12B to NAD83 (CORS96) and Mean Lower Low Water (MLLW). The x,y,z point datasets can be downloaded from the Data Downloads page or the associated data release (DeWitt and others, 2017). Interferometric Swath BathymetrySoundings and MotionInterferometric data were processed with Bathyswath version 3.10.2.0. The roll calibration trackline data were processed separately using Bathyswath Grid Processor software version 3.10.0.0. The system configuration file (.sxs) used during acquisition was updated with values obtained from roll calibration, measured instrument offsets, and SVP profiles and was then used to process the raw data files (.sxr). Acquisition parameters, navigation, and motion from the Coda Octopus F190R+, swath soundings, SOS at the sonar head, SVP cast data, and acoustic filtering constraints were incorporated and applied to each raw data file to create a processed data file (.sxp). The initial processing datum for the swath was the acquisition datum from Marinestar HP, which was WGS84 (G1762), equivalent to ITRF08 (Soler, 2014). The processed files were then imported into CARIS HIPS and SIPS version 9.0 for further editing and review of quality assurance and quality control (QA/QC). Within CARIS, outliers in the navigation data and processed soundings were removed using program filters. Any remaining data outliers were removed manually. A CARIS Bathymetry Based on Statistical Error (BASE) surface and an associated Combined Uncertainty and Bathymetry Estimator (CUBE) sample surface were created from the edited soundings. A CUBE hypothesis is the estimated value of a grid node representing all the soundings within a chosen resolution or grid-cell size (in this case, 5 m) weighted by uncertainty and proximity, giving the final value as a sample of the data within the specific grid cell. This algorithm allows for multiple grid-node hypotheses to be verified or overridden by the user while maximizing processing efficiency. Evaluation and visual inspection of the dataset and BASE surface were completed to ensure outliers and erroneous data points had been removed. The final 5-m BASE surface was then exported as an ASCII comma-delimited x,y,z point data file. Vertical TransformationUsing VDatum version 3.6, the IFB data were transformed from ITRF08 to ITRF00 and merged with the SBB dataset. The IFB and SBB data were subsequently transformed from ITRF00 to NAD83 (CORS96) and NAVD88 GEOID12B and were then transformed from NAD83 (CORS96) and NAVD88 GEOID12B into NAD83 (CORS96) and MLLW. The x,y,z point datasets can be downloaded from the Data Downloads page or DeWitt and others (2017). Digital Elevation Model (DEM)The processed NAD83 (CORS96) and NAVD88 GEOID12B x,y,z point data (ASCII files) from each vessel platform were imported into Environmental Systems Research Institute (Esri) ArcGIS ArcMap version 10.4.1 and merged into a single shapefile to create a seamless DEM (fig. 11). A triangulated irregular network (TIN) surface was generated from the x,y,z bathymetric point data using the Create TIN tool within the 3D Analyst toolbox. A soft clip was applied using the 2015 shorelines of West Ship, East Ship, Horn, and DA-10 (also known as Sand Island) Islands, which were assigned the regional operational mean high water (MHW) value of 0.23 m (Weber and others, 2005; Buster and others, 2017). The TIN dataset was used to create a raster surface using the TIN to Raster tool (3D Analyst toolbox). The data were interpolated using the nearest neighbor algorithm with a 50-m by 50-m cell size. The resultant DEM was then clipped to the survey extent using the Extract by Mask tool. 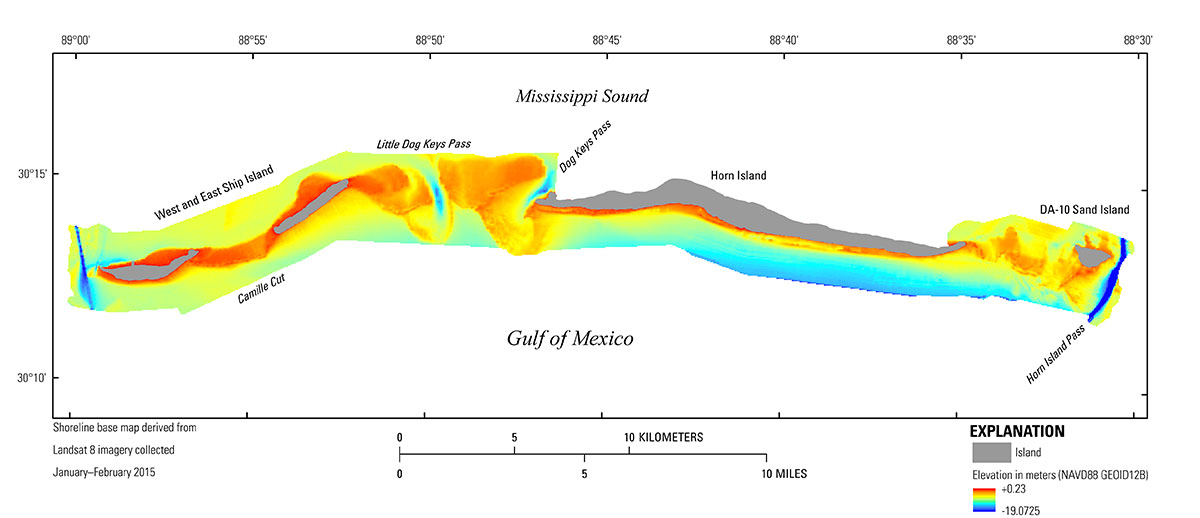 Figure 11. The 50-meter digital elevation model of the 2016 Ship (West and East) and Horn Islands bathymetric dataset. Horizontal data are referenced to North American Vertical Datum of 1983 Universal Transverse Mercator Zone 16 North, and the vertical data are referenced to North American Vertical Datum of 1988 (NAVD88) with respect to the GEOID12B model. The base map is derived from Landsat 8 imagery acquired January–February 2015 (Guy, 2015a, b). [Click figure to enlarge] Note: Any use of trade names is for descriptive purposes only and does not imply endorsement by the U.S. Government. |

![]() U.S. Department of the Interior |
U.S. Geological Survey
U.S. Department of the Interior |
U.S. Geological Survey
URL: http://pubsdata.usgs.gov/pubs/ds/1081/ds1081_data-processing.html
Page Contact Information: GS Pubs Web Contact
Page Last Modified: Thursday, 12-Apr-2018 14:45:36 EDT
