U.S. Geological Survey Open-File Report 2012-1002
High-Resolution Geophysical Data from the Inner Continental Shelf: Buzzards Bay, Massachusetts

|
Survey OperationsA suite of acoustic sonars, including an interferometric sonar (bathymetry), a multibeam echosounder (bathymetry), a sidescan sonar (backscatter), and chirp seismic-reflection profilers (subsurface stratigraphy and structure), were used to map approximately 410 km² of the inner continental shelf. Geophysical observations were validated with sediment samples, bottom photography, and video; these data are currently unpublished. The mapping (fig. 2; table 1) was conducted during research cruises aboard the NOAA Ship RUDE (2004), the Megan T. Miller (2009 and 2010) and the Scarlett Isabella (2011). Methods used in the collection, processing, and analysis of the data are detailed in the following sections. A full description of the data-acquisition parameters, processing steps, and accuracy assessments can be found in the metadata files for each individual spatial dataset (appendix 1).
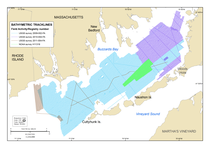
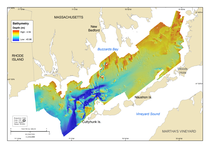
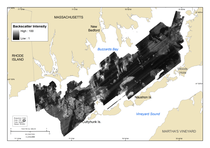
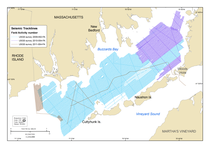
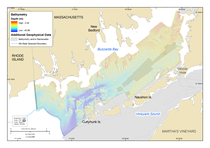
BathymetryApproximately 4,310 linear kilometers of bathymetric data (fig. 3; table 1) were acquired in the Buzzards Bay survey area using a Systems Engineering and Assessment, Ltd. (SEA) SWATHplus-M 234-kilohertz (kHz) interferometric sonar system at a ping rate of 0.25 second (s). During surveys 2009-002-FA and 2010-004-FA, the sonar transducers were mounted on a rigid pole from the starboard side of the Megan T. Miller (fig. 2), about 2.46 m below the water line. During survey 2011-004-FA, the sonar transducers were mounted on a rigid pole from the port side of the Scarlett Isabella (fig. 2) about 2.17 m below the water line. A Coda Octopus F180 motion reference unit, mounted directly above the transducers, measured vertical displacement (heave) and attitude (pitch and roll) of the vessel during data acquisition. Sound-velocity profiles were collected approximately every two hours using a hand-casted Applied MicroSystems SV Plus sound velocimeter during survey 2009-002-FA and with an ODIM MVP30 moving vessel profiler during surveys 2010-004-FA and 2011-004-FA. Data were collected with a sonar transmit power of 6 to 8 (on a relative scale ranging from 1 to 15 representing 0 to 100 percent of power levels), transmit length of 12 to 43 cycles, and a receive length of 3,072 or 4,096 samples, depending on the individual survey. Survey lines were run at an average speed of 5 nautical miles (knots) and were spaced approximately 100 m apart to obtain overlapping swaths of data and full coverage of the seafloor. A Differential Global Positioning System (DGPS) was used for horizontal positioning for all three USGS surveys. Vertical heights were determined by Real Time Kinematic Global Positioning System (RTK-GPS). Corrections were sent via cellular modem and very-high-frequency (VHF) radio to the survey vessel from the base station on land. The primary reference station is located at the USGS Marine Operations Facility (MOF) in Falmouth, Mass. (fig. 1). Buzzards Bay tidal benchmarks at Chappaquoit (station ID 8447685), Monument Beach (station ID 8447355), Piney Point Wings Cove (station ID 8447416), and Round Hill, Mass. (station ID 8447842) were surveyed with GPS to determine the offset to the Mean Lower Low Water (MLLW) datum. An average height offset was determined for these stations. Soundings were referenced to MLLW, using the RTK-GPS measured orthometric height and the calculated average height offset. SEA SWATHplus acquisition software (versions 3.06 and 3.07) and the Computer Aided Resource Information System (CARIS) Hydrographic Information Processing System (HIPS, versions 6.1 and 7.1) were used to collect and process the raw bathymetric soundings. Navigation data were inspected and edited, soundings were adjusted using corrections from RTK-GPS water-level heights and sound-velocity profile data, and any spurious soundings were eliminated before the final processed soundings were gridded at a resolution of 5 meters per pixel (fig. 4). Approximately 460 linear kilometers of multibeam-echosounder bathymetric data collected in the central part of Buzzards Bay by NOAA’s National Ocean Service (NOS) for hydrographic charting was also used as part of our ongoing effort to incorporate existing, high-quality geophysical data into our mapping program. The NOAA Ship RUDE acquired bathymetric soundings in 2004 using a RESON SeaBat 8125 455-kHz multibeam-echosounder system that was pole-mounted on the port side of the vessel (National Oceanic and Atmospheric Administration, 2004a,b). Position and attitude on the NOAA Ship RUDE were measured using a TSS POS/MV 320 position and orientation system and a Trimble DSM-212L DGPS receiver. A SeaBird SBE 19 SEACAT conductivity, temperature, and depth (CTD) profiler was used to measure sound-velocity data. Survey lines were spaced approximately 25 to 50 m apart to obtain overlapping swaths of data and full coverage of the seafloor. Navigation was based on a Global Positioning System (GPS) corrected by U.S. Coast Guard DGPS beacons located at Acushnet, Mass. (primary) and Portsmouth, New Hampshire (secondary). Tidal corrections were calculated using a discrete tidal zoning model and verified data from tidal station #8452660 at Newport, Rhode Island, and final corrected soundings were referenced to MLLW (National Oceanic and Atmospheric Administration, 2004a,b). The USGS and NOAA National Ocean Service (NOS) swath bathymetric datasets were combined into a single 5-m per pixel grid, which is available in Esri grid format in appendix 1. Additional details about the acquisition and processing of the swath bathymetric data can be found in the metadata for the trackline and grid spatial datasets in appendix 1.Acoustic BackscatterApproximately 4,230 linear kilometers of acoustic backscatter data were collected in the Buzzards Bay survey area during USGS field activities 2009-002-FA, 2010-004-FA, and 2011-004-FA with a Klein 3000 dual-frequency sidescan-sonar (132 and 445 kHz) that was towed approximately 5 to 10 m above the seafloor from an A-frame on the stern of the survey vessels (fig. 5). Navigation was recorded with a GPS antenna mounted on top of the acquisition laboratory van (surveys 2009-002-FA and 2011-004-FA) or on the pole directly above the SWATHplus (bathymetry system) transducers (survey 2010-004-FA). Horizontal offsets from the GPS antenna to the towed sidescan-sonar system, including cable-out linear layback, were measured and accounted for in the SonarPro acquisition software (versions 10.0 and 11.0). Sidescan-sonar data were typically acquired with a swath width of 200 m (100 m to either side of vessel); although this was expanded to a 300 m swath width (150 m to either side) for the area covered by NOAA bathymetric data. For all three surveys, the transmission pulse was set to 50 microseconds (µs; low frequency) and 25 µs (high frequency) with a 12-decibel (dB) fixed gain for both frequencies. The low-frequency sonar data were processed using Xsonar (version 1.1 and 2.0) and ShowImage software (Danforth, 1997) to correct for slant-range and beam-angle distortions. The processed data from each survey line were then mapped to raw raster image files (.ras) at 1-m per pixel resolution in geographic space using Xsonar. Sets of individual survey lines were then imported into PCI Geomatica (OrthoEngine version 10.0.3 and 10.1), and systematically combined into a final 1-m per pixel resolution mosaic (fig 6). The mosaic, covering a total area of approximately 410 km2 was exported from PCI as an 8-bit georeferenced tagged image file format (GeoTIFF) image for further analysis in Esri ArcGIS. The gray-scale GeoTIFF mosaic of backscatter imagery for this survey area can be found in appendix 1. Not all sidescan-sonar data were used in the final mosaic (for example, data from tielines were not used, nor were data used if the file covered an area where equal or better data were available from an adjacent sonar survey line). Additional details about the acquisition and processing of the sidescan-sonar data can be found in the metadata for the trackline and GeoTIFF mosaic spatial datasets in appendix 1.Seismic-Reflection ProfilingApproximately 4,500 linear kilometers of chirp seismic-reflection data were collected in the Buzzards Bay survey area using an EdgeTech Geo-Star FSSB subbottom profiling system and an SB-0512i towfish (FM swept frequency 0.5 to 12 kHz), which was mounted on a catamaran and towed between 30 and 50 m astern of the survey vessel (fig. 7). SonarWiz seismic-acquisition software was used to control the Geo-Star topside unit, digitally log trace data in the SEG-Y rev. 1 format (IEEE floating point), and record GPS navigation coordinates to the SEG-Y trace headers (in arc second of latitude and longitude, multiplied by a scalar of 100). During 2009-002-FA, data were acquired using a 0.12-s shot rate, a 20-millisecond (ms) pulse length, and a 0.7- to 12-kHz frequency sweep. Traces were recorded in depth, assuming a constant sound velocity of 1,500 meters per second (m/s), with trace lengths of approximately 66 m (1,250 samples per trace at a 0.000053-s sample interval). During 2010-004-FA, files l113f1 - l115f1 were acquired using a 0.25-s shot rate, a 5-ms pulse length, and a 0.5- to 8-kHz frequency sweep, with recorded trace lengths of approximately 200 ms (4,340 samples per trace at a 0.000046-s sample interval). The remaining files from 2010-004-FA (Julian days 141 through 155) were acquired using a 0.25-s shot rate, a 50-ms pulse length, and a 0.5- to 4.5-kHz frequency sweep, with recorded trace lengths of approximately 199 ms (4,328 samples per trace at a 0.000046-s sample interval). During 2011-004-FA, data were acquired using a 0.25-s shot rate, a 5-ms pulse length, and a 0.5- to 8-kHz frequency sweep, with recorded trace lengths of approximately 200 ms (4,340 samples per trace at a 0.000046-s sample interval). Seismic-reflection data were processed using SIOSEIS (Henkart, 2011) and Seismic Unix (Stockwell and Cohen, 2008). All navigation data were extracted from trace headers, edited, and saved to ASCII text files. Water column portions of the traces were muted (2009-002-FA and 2010-004-FA data), and the effects of sea-surface heave were minimized (2010-004-FA data). Trace amplitudes were gained using a time varying function (2009-002-FA and 2010-004-FA data) and normalized using automatic gain control. Profiles of the final processed trace data are included in this report as 8-bit, grayscale, variable-density plots in the portable network graphic (PNG) format. The final shot-point and trackline navigation are also included in two Esri shapefiles in appendix 1. Additional details about the acquisition and processing of seismic-reflection data can be found in the metadata for the trackline and shot-point spatial datasets and in the metadata for the PNG profile images in appendix 1.SamplingSampling surveys were conducted aboard the research vessel (RV) Connecticut (September 9-14, 2010) and the U.S. Environmental Protection Agency’s (EPA) ocean survey vessel (OSV) Bold (September 9-16, 2011) during USGS field activities 2010-005-FA and 2011-015-FA, respectively, to ground-truth the geophysical survey data and to help form the basis for future interpretive geologic maps. These sampling surveys cover the Buzzards Bay and Vineyard Sound survey areas, as well as parts of Cape Cod Bay and around the islands of Nantucket and Martha’s Vineyard, Mass. Spatial data, including the results of sediment sample analyses and the location of bottom photography and video collected during these surveys are currently unpublished. Additional Geophysical DataAdditional geophysical and geologic data, including swath bathymetry, acoustic backscatter, seismic-reflection, and sampling data, are available for areas directly adjacent to the Buzzards Bay survey area (fig. 8). Some of these data were collected as part of the cooperative mapping program between the USGS and the Massachusetts Office of Coastal Zone Management (CZM); while other data were collected by the USGS or NOAA during the past decade. The data and (or) additional information about these datasets are available on the Internet, at
|

![]() U.S. Department of the Interior |
U.S. Geological Survey
U.S. Department of the Interior |
U.S. Geological Survey
URL: http://pubsdata.usgs.gov/pubs/of/2012/1002/html/data.html
Page Contact Information: GS Pubs Web Contact
Page Last Modified: Thursday, 02-May-2013 09:11:05 EDT