Data Series 921
| Data ProcessingFRF ProcessingThe data are initially post-processed with multiple software packages to produce the final digital elevation model (DEM) products. Terrestrial GPS data are post-processed with National Geodetic Survey's (NGS) continuously operating reference stations (CORS) and integrated with post-processed IMU and DMI data within Applanix's PosPac software to derive a smoothed best estimate of vehicle trajectory (SBET). The SBET and bore-sight measurements are imported into Riegl's RiProcess lidar software where the lidar point cloud is geo-rectified. Control monuments and previously validated data are used for comparison to determine the accuracy of the survey. The processed point cloud is manipulated within RiProcess to delineate the shoreline, filter structures and vegetation, and classify points as water, vegetation, structures, and ground. The classified point cloud is exported as a .las file. The .las file is imported into Applied Imagery's Quick Terrain Modeler software in which a mean-z (elevation) algorithm and an anti-aliasing filter are applied to the point-cloud data to grid the data at a 0.5 meter (m) resolution. After gridding is completed, the DEM (surface) is inspected for any remaining noise, such as spikes and wells, which are removed prior to final export as an American Standard Code for Information Interchange (ASCII) .xyz file. SPCMSC ProcessingWithin Esri's ArcCatalog, the ASCII xyz file was converted to an ArcGIS multipoint feature using the ASCII 3D To Feature Class tool and was projected from North American Datum of 1983 (NAD 83) State Plane New York Long Island (meters) to NAD 83, Universal Transverse Mercator (UTM) Zone 18N (meters). The point data were converted back to ASCII xyz format for publication using the Feature Class Z to ASCII tool (fig. 5). The uncertainty for the interpolated DEM was determined using a methodology established by Lentz and Hapke (2011) and Lentz and others (2013) by withholding a random distribution of 10 percent of the point data from the gridding process (Create Terrain and Build Terrain tools in ArcGIS), comparing the elevations of the withheld points to the gridded surface, and calculating a root mean square error (RMSE) on the basis of the elevation differences. The resulting RMSE uncertainty of the interpolated surface was determined to be ±0.026 m. The Terrain to Raster tool in ArcGIS was then used to export the surface raster with 1-m cell size for publication. 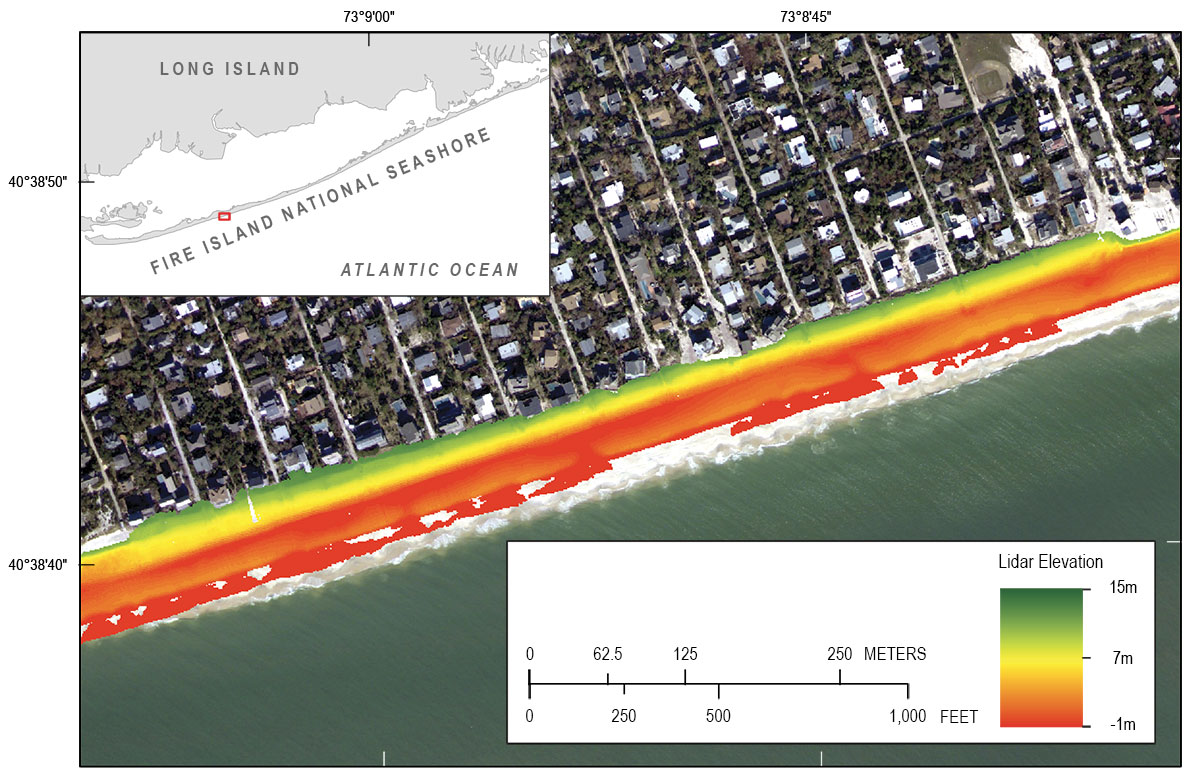 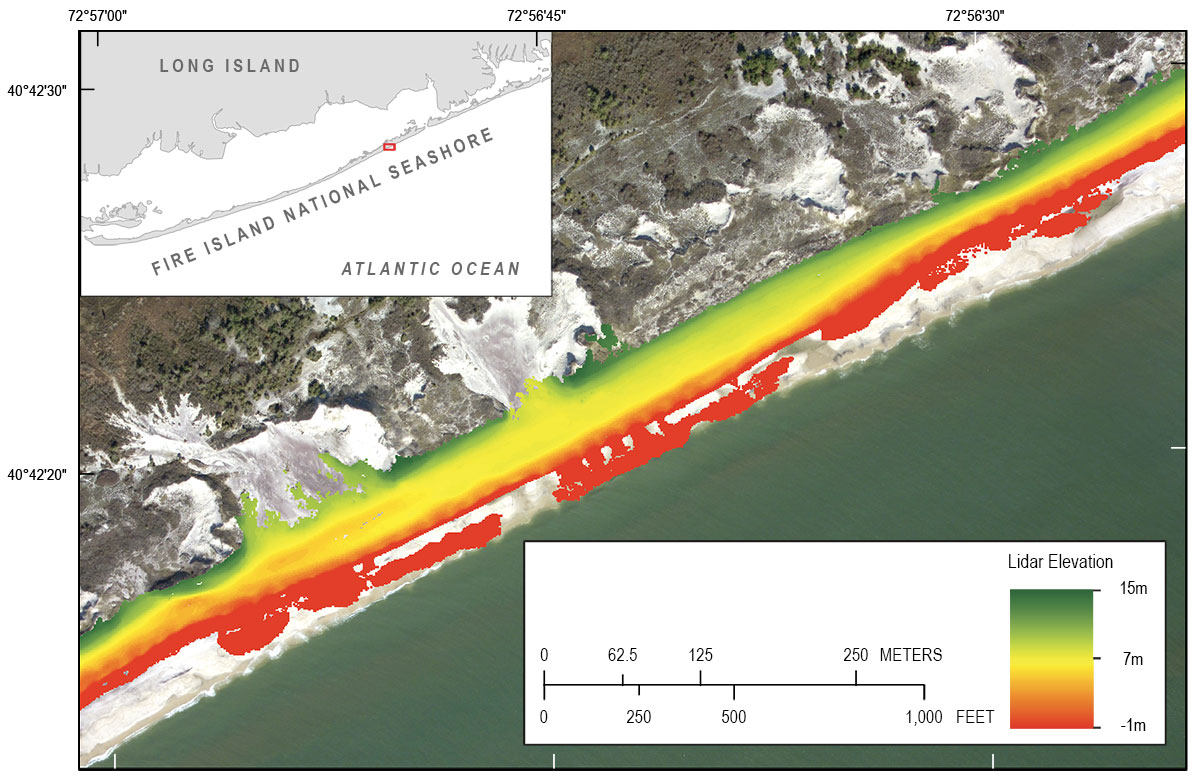 Figure 5. Processed ground-based lidar digital elevation model along the western (upper panel) and eastern (lower panel) Fire Island, New York. Red box on inset map indicates map location.
Figure 5. Processed ground-based lidar digital elevation model along the western (upper panel) and eastern (lower panel) Fire Island, New York. Red box on inset map indicates map location. |

![]() U.S. Department of the Interior |
U.S. Geological Survey
U.S. Department of the Interior |
U.S. Geological Survey
URL: http://pubsdata.usgs.gov/pubs/ds/0921/ds921_data-processing.html
Page Contact Information: GS Pubs Web Contact
Page Last Modified: Monday, 28-Nov-2016 20:31:59 EST
