
Data Processing
SINGLE-BEAM BATHYMETRY
Navigation
The coordinate values of the GPS base station (TMRK) are the time-weighted average of values obtained from the National Geodetic Survey (NGS) On-Line Positioning User Service (OPUS). The base station coordinates were imported into GrafNav® version 8.1 (Waypoint Product Group) and the kinematic GPS data from the survey vessel were post processed to the concurrent GPS session data at the base stations. During processing, steps were taken to ensure that the trajectories between the base and the rover were clean, resulting in fixed positions. By analyzing the graphs, trajectory maps, and processing logs that GrafNav produces for each GPS session, GPS data from satellites flagged by the program as having poor health or satellite time segments that had cycle slips could be excluded, or the satellite elevation mask angle could be adjusted to improve the position solutions. The final differentially corrected precise DGPS positions were computed at 1-second (s) intervals for each rover GPS session and exported in ASCII text format to replace the uncorrected real-time rover positions recorded during acquisition. The GPS data were processed and exported in the World Geodetic System of 1984 (WGS84) (G1150) geodetic datum.
Soundings and Motion
The final DGPS positions exported from GrafNav were merged with the raw HYPACK files using the System for Accurate Nearshore Depth Surveying (SANDS), version 3.2. SANDS is a single-beam acoustic (sounding) GPS-based hydrographic processing software developed by the USGS for shallow water bathymetric mapping. Data were merged, geometrically corrected, and exported from SANDS in the originally acquired ellipsoid datum of WGS84 (G1150), which is equivalent to to the International Terrestrial Reference Frame of 2000 (ITRF00).
The single-beam dataset consists of 135,036 x,y,z data points with a WGS84 ellipsoidal elevation range of -28.446 m to -41.633 m, a mean elevation of -31.325 m, and a standard deviation of 2.13 m. Using the transformation software VDatum version 3.2, the data were then converted horizontally to the North American Datum of 1983 (NAD83) reference frame and the orthometric vertical datum NAVD88 using the NGS geoid model of 2009 (GEOID09). The transformed point data were imported into ESRI ArcGIS® version 10.0.5 and merged with the swath bathymetric point data prior to gridding.
INTERFEROMETRIC SWATH BATHYMETRY
Navigation and Motion
Position data recorded by the Coda-Octopus F190R IMU system were corrected in real time via the OmniSTAR HP differential navigation system. The IMU also applied real-time motion corrections for heave, roll, and pitch to the vertical component of each position fix. The corrected positions were then integrated with the observed bathymetric values to calculate a final ellipsoid height and position representing the elevation of the seafloor with respect to the geodetic reference frame ITRF05 across the swath range.
Soundings
SWATHplus serves as both an acquisition software and initial processing software. Preliminary roll calibration trackline data were collected and processed using SEA SWATHplus and Grid Processor software version 3.7.17. Instrument offset and calibrations values were input into the session file (.sxs), and the raw data files (.sxr) were then processed using the updated system configuration containing roll calibration values, measured equipment offsets, acquisition parameters, navigation and motion from the F190R, SOS at the soonar head, and SVP cast data. Any calibration offsets or acoustic filtering applied in SWATHplus is also written to the processed data file (.sxp), which can then be imported into advanced sounding data processing software such as CARIS HIPS and SIPS®. The initial real-time processing datum for the swath and backscatter data was ITRF05, which is the acquisition datum for OmniSTAR HP position and navigation data.
All processed data files were imported into CARIS HIPS and SIPS version 7.1, and the original sounding data were edited for outliers using the program's depth filters and reference surfaces. Any remaining outliers were then edited out manually. A CARIS BASE (Bathymetry with Associated Statistical Error) surface with associated CUBE (Combined Uncertainty and Bathymetry Estimator) sample surface was created from the edited soundings dataset. A BASE hypothesis is the estimated value of a grid node representing all the soundings within a chosen resolution or grid-cell size (for example, 5 m) weighted by uncertainty and proximity, giving the final value as a "sample" of the data within the specific grid cell. This algorithm allows for multiple grid-node hypotheses to be verified or overridden by the user while maximizing processing efficiency.
A 5-m resolution CUBE surface was created to perform initial hypothesis editing using the CARIS Subset Editor tool, followed by higher resolution surface detail editing within subset editor. The sample x,y,z data were exported as ASCII text at a 5-m x 5-m sample resolution in the ellipsoid datum of ITRF05. The data were then transformed NAD83 and NAVD88 (GEOID09) using VDatum version 3.2.
DIGITAL ELEVATION MODELUsing ESRI ArcGIS, the swath and the single-beam elevations were examined for spatial distribution and vertical agreement. After combining the datasets, a triangulated irregular network (TIN) was generated to provide unassuming linear predictions over data gaps in order to aid in the process of gridding the data. Converting the data points to a TIN surface also disallows any predictions outside the actual data extent. Using the natural neighbor algorithm in ArcGIS software, a DEM was generated at 50-m x 50-m cell resolution (fig. 6). Finally, a low pass raster-data filter was used to improve the uncertainty over data gaps between tracklines due to large trackline spacing relative to the swath width during acquisition, which is inherent to shallow water surveys over a large area. |
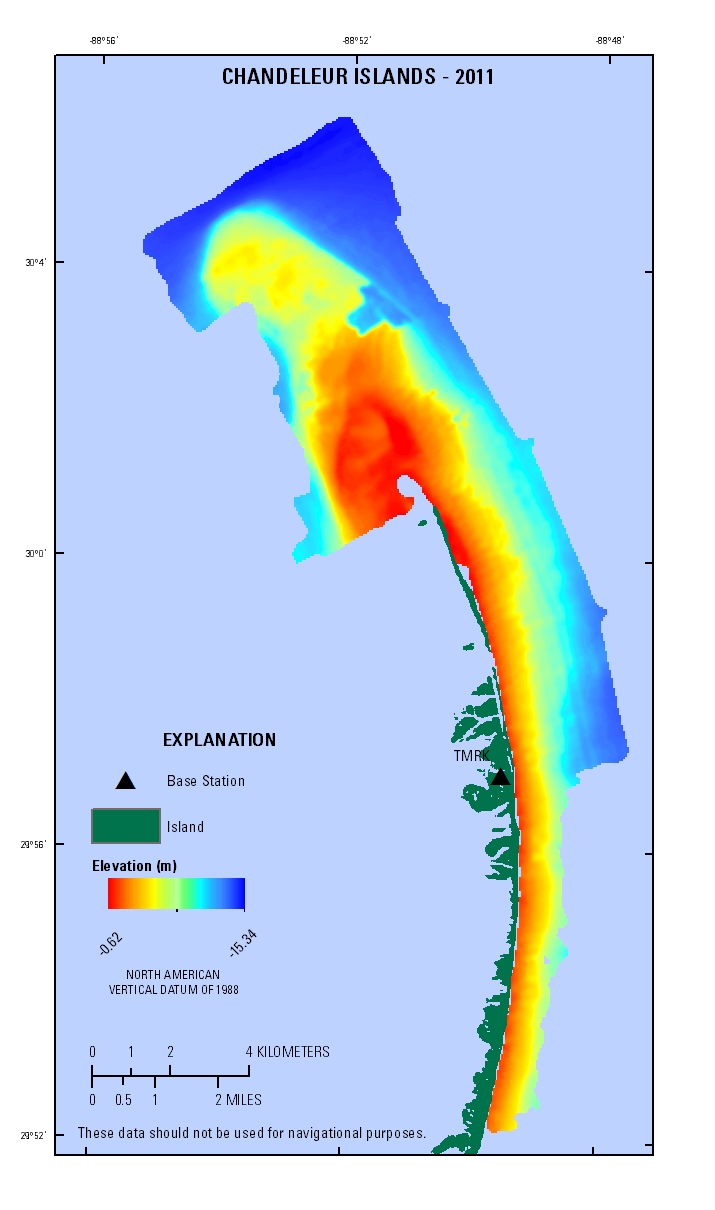
Figure 6. A 50-meter grid of 2011 bathymetry surrounding the Chandeleur Islands, Louisiana. Island extent is derived from USGS lidar data collected in 2011. [Click to enlarge] Abbreviation: m, meter. |
Note: Any use of trade names is for descriptive purposes only and does not imply endorsement by the U.S. Government.
