
Survey Overview and Acquisition
Geophysical survey data were collected during two cruises covering an area of approximately 83 square kilometers (km2). Single-beam data (11BIM02) were collected June 6-16, 2011, aboard the 22-foot (ft) R/V TwinVee (fig. 2), from which 446 line-km of bathymetry data were collected. Tracklines (158 lines) were primarily perpendicular to shore and spaced approximately 100 meters (m) apart (fig. 3). Additional single-beam data were also acquired along six long-term change lines spaced approximately 1 km apart extending 6 km offshore on both the gulf and sound sides of the islands. These lines were designed to reoccupy previously collected single-beam bathymetric survey lines, allowing for comparison of bathymetric profiles from multiple surveys independent of larger scale mapping efforts.
Interferometric swath and seismic data (11BIM01) were collected June 2-15, 2011, aboard the 26-ft R/V SurveyCat (fig. 4). A total of 572 line-km of data were collected utilizing an integrated suite of geophysical instruments capable of mapping the nearshore environment around the island, including an interferometer that provided swath bathymetry (this report) and a high-resolution chirp subbottom profiler that imaged the shallow subbottom (Forde and others, 2013). Swath bathymetry and chirp tracklines (133 lines) were generally shoreline parallel, and line spacing varied from 50 m to 250 m, depending on water depth (fig. 5). Tie lines, or tracklines perpendicular or oblique to shoreline orientation, were also surveyed as a check on bathymetric soundings and to provide dip or apparent dip lines for the chirp profiles. The North American Vertical Datum of 1988 (NAVD88) orthometric elevation range for all of the bathymetric data was -0.548 m to -16.446 m, derived by the National Geodetic Survey's (NGS) geoid model of 2009 (GEOID09).
SINGLE-BEAM BATHYMETRY
Navigation and Motion
A Geographic Positioning System (GPS) base station was assembled at a temporarily installed USGS benchmark (TMRK), located on a wide sand flat on the sound side of the island within about 15 km of the farthest single-beam trackline (fig. 3). GPS receivers recorded the 12-channel full-carrier-phase positioning signals (L1/L2) from satellites via a Thales choke-ring antenna. This GPS instrument combination was duplicated on the survey vessel (rover). The base receiver and the rover receiver recorded their positions concurrently at 1-second (s) intervals throughout the survey. Boat motion was recorded at 50-millisecond (ms) intervals using a Teledyne TSS Dynamic Motion Sensor (TSS DMS-05) (table 1). HYPACK® version 10, a marine surveying, positioning, and navigation software package, managed the planned-transect information and provided real-time navigation, steering, correction, data quality, and instrumentation-status information to the boat operator.
Soundings
Aboard the R/V TwinVee, depth soundings were recorded at 50-ms intervals using a Marimatech E-SEA-206 echosounder system with dual 208-kilohertz (kHz) transducers (fig. 2) (table 2). Data from the GPS receiver, motion sensor, and fathometer were recorded in real time and merged into a single raw data file (.raw) in HYPACK, with each device string referenced by a device identification code and time stamped to Coordinated Universal Time (UTC).
Sound Velocity
Sound velocity measurements were collected using an Applied Microsystems Smart Sound Velocity Profiler (SVP). The instrument was cast overboard periodically throughout the survey to observe changes in water-column speed of sound (SOS). The recorded daily mean sound velocity for the duration of the survey was 1524.75 meters/second (m/s).
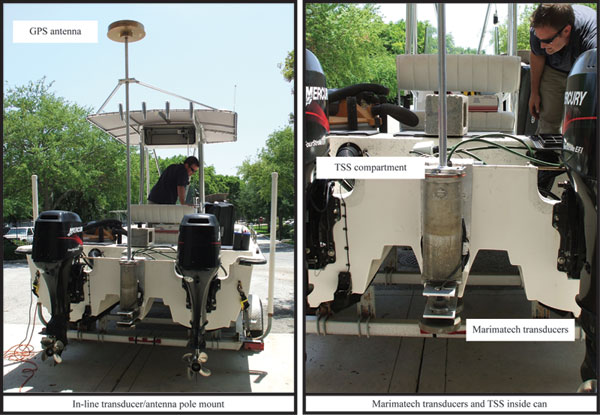
Figure 2. The Research Vessel (R/V) TwinVee, mobilized with the Marimatech single-beam bathymetry equipment configuration. |
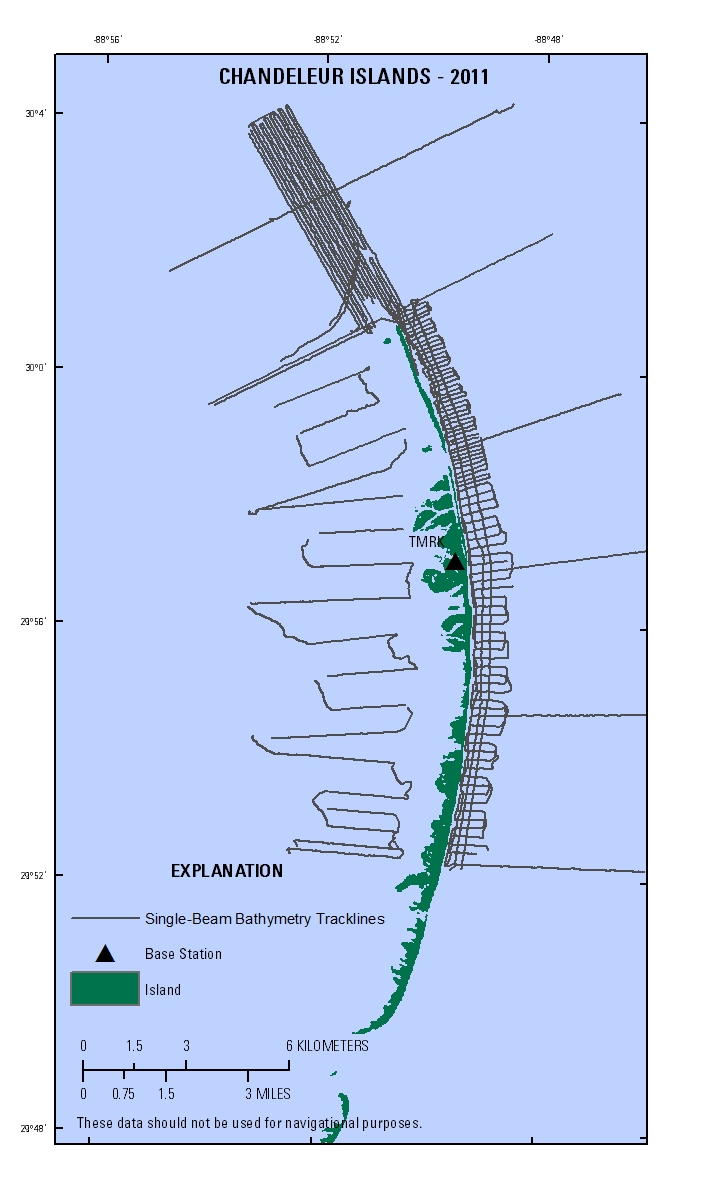
Figure 3. Single-beam bathymetry tracklines for Chandeleur Islands survey in 2011. Island extent is derived from USGS lidar data collected in 2011. [Click to enlarge] |
|
Table 1. Specifications for the Teledyne TSS-DMS-05 motion sensor used during the single-beam bathymetry survey (http://www.teledyne-tss.com/pdf/T.TSS-ds.DMS.pdf, 202 KB).
|
Table 2. Specifications for the Marimatech E-SEA SOUND 206 fathometer used during the single-beam bathymetry survey (http://www.ekohidrotechnika.com/_media/research/equipment/E-Sea_103_206.pdf, 246 KB).
|
||||||||||||||||||
SWATH BATHYMETRY
Navigation and Motion
The position data string was integrated in real time using a Coda-Octopus F190R Precision Attitude and Positioning System, which includes a waterproof inertial measurement unit (IMU). The IMU is mounted underwater between the transducer heads to minimize lever arm geometry errors between the observed depths and associated vessel motion. Real-time corrected positions were acquired via the use of the OmniSTAR HP (High-Precision differential global navigation satellite system) satellite constellation subscription. In addition to the position string, the F190R records heave, roll, and pitch of the vessel during acquisition (table 3), which are all used to calculate the precise position of the measured reference point near the head of the transducers. Equipment offsets were entered into the F190 software prior to the survey and instrument calibration. Planned survey tracklines were loaded into HYPACK for survey orientation, providing a navigation guide for the boat operator.
Soundings
Interferometric swath bathymetry was collected aboard the R/V SurveyCat using a 234-kHz Systems Engineering and Assessment, Ltd. (SEA), SWATHplus-M (medium frequency) interferometric sonar system (table 4). The transducers were mounted on a sled attached to a rail system fastened between the catamaran hulls, allowing the instrument to align directly below the GPS antennae in order to minimize geometry errors (fig. 4). OmniSTAR HP position correction data and motion data from the IMU were integrated with interferometric soundings in the SWATHplus software package with positional and calibration offsets predefined by a session file (.sxs), allowing for real-time-corrected depths. Prior to deployment, all equipment offsets were surveyed in dry dock with the use of a laser total station. During the survey all swath tracklines were recorded in SEA raw data format (.sxr).
Sound Velocity
A Valeport® Mini Sound Velocity Sensor (SVS) was attached to the transducer mount and collected continuous SOS measurements at the depth of the transducers. These values were directly read and incorporated into the SWATHplus acquisition software giving real-time speed of sound at the transducer while underway (table 5). In addition, a separate sound velocity profiler (Valeport miniSVP) was used to collect speed of sound profiles (water surface to seafloor) at intervals throughout the survey (table 6). Accurate SOS values throughout the water column are essential to accurately map the seafloor with a swath system, particularly at swath beam range extents, and most notably at depths greater than 3 m where SOS has commonly demonstrated variability due to thermoclines and changes in salinity. If SOS is inaccurate, water column refraction will significantly decrease data precision and accuracy throughout the beam range, but particularly at the far range, increasing manual post-survey processing time and interpolation uncertainty upon creation of a Digital Elevation Model (DEM).
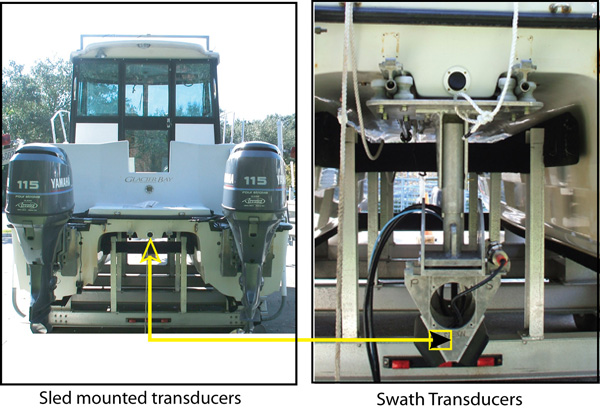
Figure 4. The Research Vessel (R/V) SurveyCat mobilized with roof-mounted navigation bracket and interferometric swath bathymetry transduces and IMU wetpod cradle mounted to a sled and rail system between the catamaran hulls. |
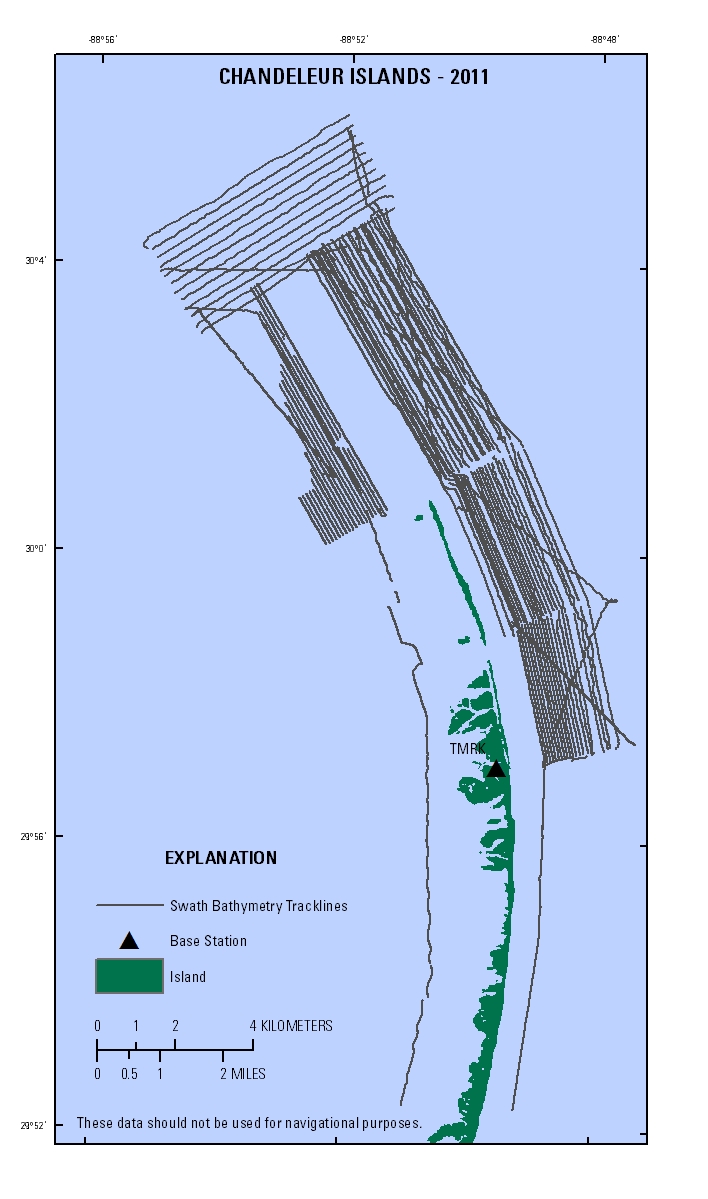
Figure 5. Swath bathymetry tracklines for Chandeleur Islands survey in 2011. Island extent is derived from USGS lidar data collected in 2011. [Click to enlarge] |
|
Table 3. Specifications for the Coda Ocotopus F190R inertial measurement unit (IMU) used during the swath bathymetry survey (Coda Octopus Group, Inc.) (http://www.codaoctopus.com/octopus-f180-series/).
|
Table 4. Specifications for the SWATHplus-H sonar system (SEA Ltd.) transducers used to collect interferometric swath bathymetry during the survey (http://www.sea.co.uk/swathpluspi.aspx?nav=products).
|
|||||||||||||||||||||||||||||||
|
Table 5. Specifications for the Valeport Mini Sound Velocity Sensor (SVS) used to collect continuous sound velocity, co-located with the bathymetry transducers and IMU (Valeport, Ltd.).
|
Table 6. Specifications for the Valeport Mini Sound Velocity Profiler (SVP) used to collect positional sound velocity profiles through the water column (Valeport, Ltd.).
|
|||||||||||||||||||||||||||||||
Note: Any use of trade names is for descriptive purposes only and does not imply endorsement by the U.S. Government. To view PDF documents, you will need the latest version of Adobe Acrobat Reader or similar software.
