Data Series 1005
| Error AnalysisSingle BeamThe single-beam data were imported into ArcGIS, and a locally produced Python script was created to evaluate elevation differences at the intersection of crossing tracklines. The script calculates the elevation difference between points at each intersection using an inverse distance-weighting equation. Elevation values at line crossings should not differ by more than the combined instrument acquisition error (per manufacturer specified accuracies, tables 1 and 2). GPS cycle slips, stormy weather conditions, and rough sea-surface states can contribute to poor data quality. If discrepancies that exceeded the acceptable error threshold were found, then the line in error was either statically adjusted or removed. A line in error constitutes (1) a segment where several crossings are incomparable, (2) a known equipment problem, and (or) (3) known bad GPS data identified in the post-processing steps. The number of crossings and the offset values for the individual SBB platforms (14BIM02 and 14BIM03), alongside the combined total, are listed in Table 12. This table shows the absolute value of the difference in the elevation (z) at the crossing, the total number of crossings greater than or equal to the specified value (1.00 m, 0.50 m, 0.30, 0.15 m, and 0.10 m), and lists the percentage for all SBB crossings.
Table 12. Crossing summary for the single-beam bathymetry.
Interferometric SwathThe stated horizontal accuracy of the Marinestar High Performance (HP) broadcast subscription from Fugro used during swath bathymetry acquisition is ± 10 centimeters (cm) horizontally and ± 15 cm vertically 95 percent of the time. The Coda Octopus F190R IMU integrates the Marinestar HP position with motion, measures vessel velocity (± 0.014 m/s), roll (± 0.025 degrees), pitch(± 0.025 degrees), heading (1-m baseline—0.1 degrees), and heave (5 cm per meter of depth) (table 6). The vertical accuracy of the Swathplus-H system varies with depth and across track range. At 57 m the system is accurate to 10 cm vertically (table 7). Sound velocity captured in real-time at the transducer head was collected by a Valeport Mini SVS with a stated maximum error of ± 0.017 m/s (table 8). Sound velocity profile cast data tables were also applied to the swath data based on time, water depth, and spatial representation during the survey. The SVP data were captured with a Valeport Mini SVP with a stated accuracy of ± 0.02 m/s (table 9). Digital Elevation Model (DEM) Error
A comparison of the DEM versus the sounding (x,y,z point data) was plotted to evaluate how well the DEM represented the original sounding data quantitatively and spatially. The comparison was performed by extracting depth values from the grid at x,y positions of the measured data point soundings for each platform using the GMT Tools grdtrack filter. The filter uses a bicubic interpolation to derive a grid value at the sounding position. The root mean square (RMS) error, quantified as the difference between the measured depth and the grid depth values, was calculated for each platform using the following equation:
Table 13. Error analysis between grid values and trackline point data single-beam bathymetry (SBB) and cloud interferometric bathymetry (IFB). Maximum negative and positive errors represent interpolated grid values being larger and smaller than the corresponding sounding value, respectively. All error values and average values are expressed in meters (m).
The difference between the DEM and the original sounding values were plotted, color coded, and placed against the backdrop of the DEM to visually characterize differences. This display provided a visual aspect of the spatial representation of error (fig. 9). This comparison demonstrates how well the model surface represents the original sounding and sample data (fig. 2). There is a total of 2,908,880 samples, and the root mean square error of all points is 0.05 m. In this example, there may be hundreds of samples in a 100-m by 100-m cell; however, all the samples are only represented on the surface by one value, typically the mean. Therefore, in cases where terrain slope is high, the gridding formula mutes the actual variability in the sample data. This sacrifice is necessary when creating continuous surfaces over bathymetric datasets where trackline spacing did not allow for across-track overlap. Finlayson and others (2011), Fregoso and others (2008), and Foxgrover and others (2004) also reported difficulty with gridding over steep slopes.
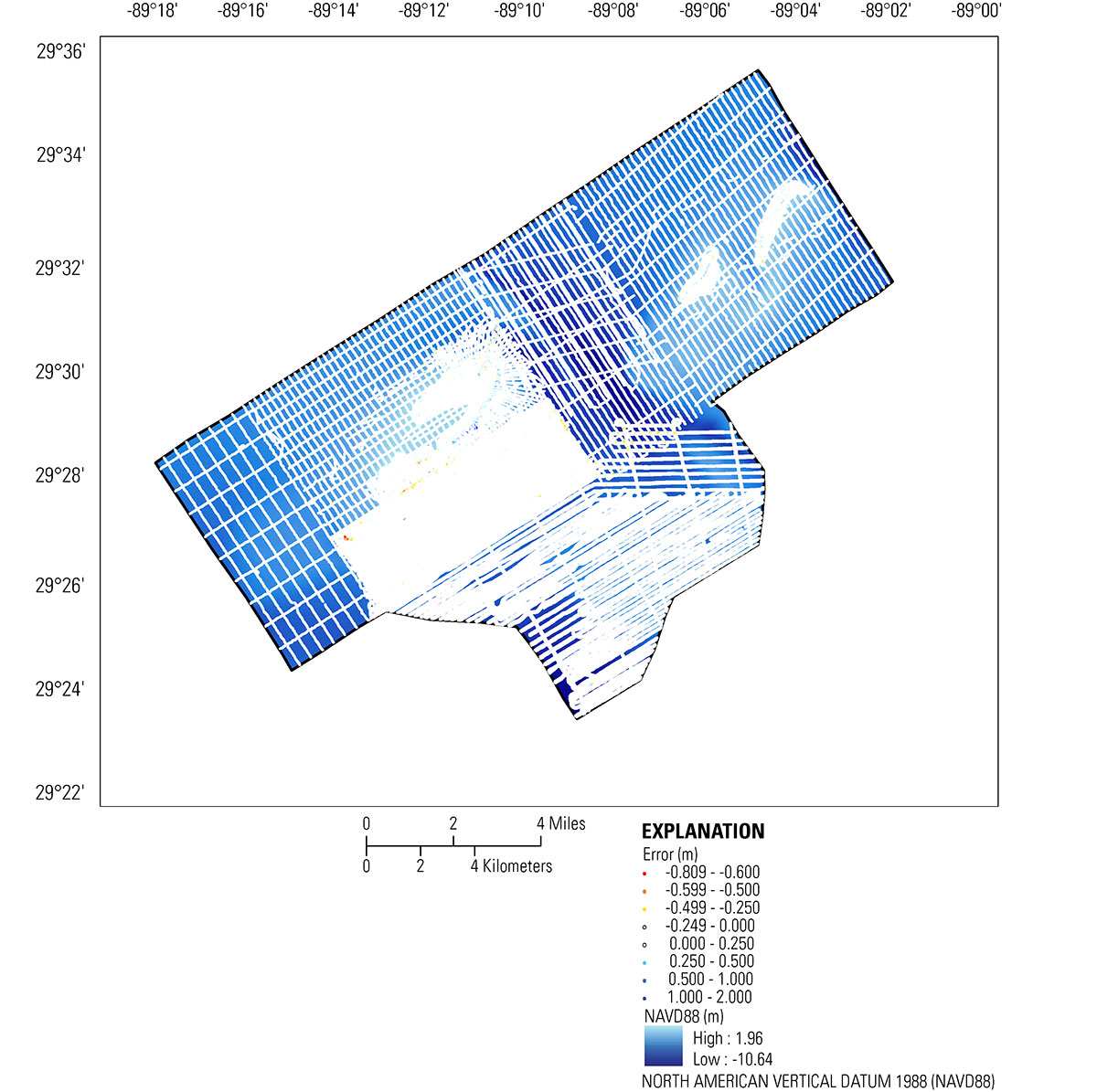 Figure 9. Error values representing the difference between the digital elevation model and the value at each sample point. White symbols represent acceptable grid error of ±0.250 meters (m). [Click to enlarge.] |

![]() U.S. Department of the Interior |
U.S. Geological Survey
U.S. Department of the Interior |
U.S. Geological Survey
URL: http://pubsdata.usgs.gov/pubs/ds/1005/ds1005-error-analysis.html
Page Contact Information: GS Pubs Web Contact
Page Last Modified: Monday, 28-Nov-2016 20:51:10 EST