|
|
Several kinds of platforms are used to support the instruments that measure ocean and coastal parameters for research, including surface moorings, subsurface moorings, bottom-mounted tripods, quadpods and other structures. All our platforms have weights to hold them on the sea floor, and most have a float and release system to allow them to be recovered. These platforms were typically deployed in spatial arrays for 1 to 6 months as part of regional or process studies, or long-term monitoring programs.
This section describes the platforms used to deploy oceanographic instruments in the field. Subsequent sections describe the instruments and sensors mounted on the platforms to make the observations. This information provides the background necessary for understanding the treatment of the measurements stored in the time-series database.
Tripods and Quadpods
Many USGS programs require measurements near the sea floor; these measurements are made from bottom tripods or quadpods (structures that rest on the seabed and designed to have a minimal effect on flow, with three or four legs, respectively). Several shapes and sizes of bottom frames have been used to make near-bottom measurements (figs. 4AD; Butman and Folger, 1979). The frames deployed are 1 to 3 meters tall and carry a suite of oceanographic sensors and data loggers appropriate to the experiment.
The time-series data collection (previously database) contains data collected by a variety of sensors and data-logging systems deployed on these frames. Between 1975 and about 1993, the standard system used a SeaData data logger and measured near-bottom current speed with 2 Savonius rotors and current direction with a single vane, temperature, pressure, and turbidity (Butman and Folger, 1979). A downward-looking time-lapse camera was deployed to record changes to the sea floor. Between 1993 and about 2004, the standard system used a MIDAS data logger (Martini and Strahle, 1993) and measured near-bottom currents with 2 four-axis acoustic time of travel current-velocity sensors, temperature, conductivity, pressure, and turbidity. Downward-looking time-lapse camera systems were also deployed on these frames. Since 2004, the frames have been deployed with a variable configuration of sensors and data loggers. In addition to the near-bottom instrumentation, most of the tripods are fitted with an upward-looking ADCP that obtains measurements of currents throughout the water column.
Other Sea-Floor Platforms
As research has been conducted in shallow water and estuaries, low-profile platforms have been developed to support near-bottom measurements. A variety of low-profile structures have been developed and deployed. Two of particular interest are the Shallow Water Irradiance Platform (SWIP) (fig. 5), which supports water quality, turbidity and upward-looking current measurements, and the New Instrument for Making Bottom Boundary Layer Evaluations (NIMBBLE) (fig. 6), a platform that was developed to obtain bottom shear stress measurements (Sherwood, 2014).
Moorings
Surface and subsurface moorings are used to obtain measurements near the surface and in the water column (figs. 7A, 7B, 7C). Moorings support a variety of instrument types, most commonly current meters and temperature/conductivity/transmission sensors. Surface buoys may support near-surface sensors and meteorological sensors. Subsurface moorings are routinely kept taut and upright with subsurface flotation.

Figure 7A. Subsurface mooring that includes a 36 inch steel float (orange ball) with temperature-salinity sensor attached, and a time-series sediment trap (yellow cone) being deployed from U.S. Coast Guard Cutter Marcus Hanna in Massachusetts Bay. |
Figure 7B. Schematic diagram of a subsurface mooring to be deployed at 31.5 meters depth. |

Figure 7C. Schematic diagram of a surface mooring to be deployed at a depth of 30.5 meters, with ARGOS telemetry of position. |
| Click on figures for larger images.

Figure 4A. Large bottom tripod frame being deployed from the U.S. Coast Guard Cutter Marcus Hanna at a site in Massachusetts Bay. |

Figure 4B. Three types of bottom frames on the dock just prior to loading aboard ship for deployment as part of an experiment near Myrtle Beach, South Carolina. |

Figure 4C. A small tripod frame, about 1.5 meters high, being deployed at a site in Massachusetts Bay. |

Figure 4D. Instrument package used in the Lydonia Canyon experiment, on the continental slope near Cape Cod, designed to obtain near-bottom observations in areas of rough topography. |
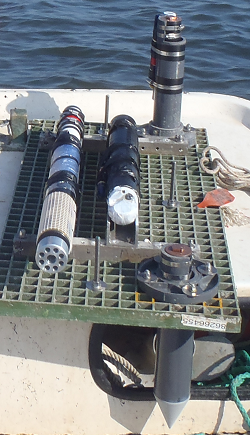
Figure 5. Shallow water irradiance Platform (SWIP) prior to deployment in Barnegat Bay, New Jersey.
|

Figure 6. New Instrument for Making Bottom Boundary Layer Evaluations (NIMBBLE) platform prior to deployment south of Marthas Vineyard, Massachusetts.
|
|



